Atualizar informações de pulsos por grau
Os robôs Yaskawa Motoman requerem o conhecimento da relação de pulsos por grau para todos os eixos do robô para converter os valores angulares da junta em pulsos e vice-versa. O RoboDK gera automaticamente programas com as informações de pulso corretas se a relação de pulsos por grau for fornecida corretamente nos parâmetros do robô.
Você pode carregar o arquivo ALL.PRM do seu controlador Yaskawa Motoman no RoboDK para extrair automaticamente a relação pulsos/grau. O arquivo ALL.PRM deve estar disponível quando você realizar um backup completo do controlador. As etapas a seguir demonstram o procedimento a ser usado nesse caso:
1.Abra seu robô no RoboDK.
2.Arraste e solte o arquivo ALL.PRM no RoboDK para abri-lo.
3.Aceite as alterações e você verá as informações de pulsos/graus atualizadas para o seu robô. Você poderá ver uma mensagem de aviso se não tiver selecionado o robô correto.
4.As informações de pulsos/graus são salvas com o arquivo de projeto RDK. Você também pode salvar o robô clicando com o botão direito do mouse sobre ele e selecionando Salvar como... e substituir esse robô em outros projetos clicando com o botão direito do mouse sobre um robô e selecionando Substituir robô.
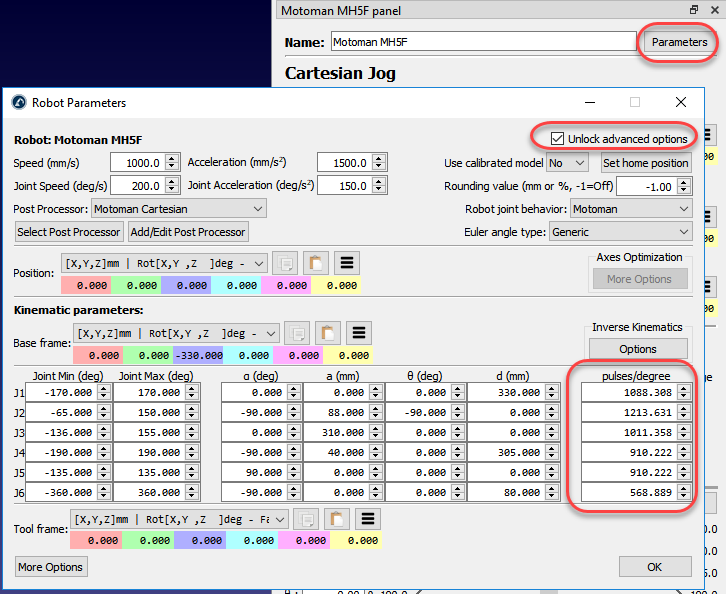
Siga estas etapas para verificar se essas informações estão disponíveis para o seu robô (ou para atualizá-las):
1.Clique duas vezes em seu robô Yaskawa Motoman no RoboDK
2.Selecionar parâmetros
3.Selecione Desbloquear opções avançadas
4.Revisar ou atualizar os valores de pulsos/graus para cada articulação
Quando essas informações estiverem atualizadas, você poderá gerar seus programas com as informações corretas de pulsos/graus.