Robôs Yaskawa Motoman
O RoboDK suporta todos os controladores de robôs Yaskawa Motoman desde os controladores XRC. Você pode criar arquivos de programa JBI diretamente do RoboDK e mover o robô real a partir do RoboDK usando o driver para robôs Yaskawa Motoman.
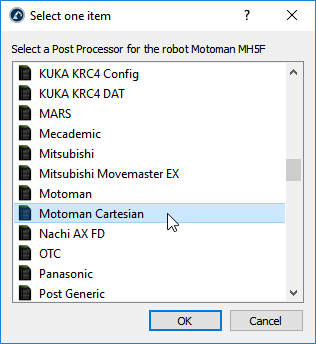
Por padrão, quando você gera um programa JBI a partir do RoboDK, verá as posições dos pontos em pulsos. Algumas operações, como a alteração da ferramenta do seu programa (SETTOOL) ou a edição de pontos cartesianos (Relative Job), exigem opções específicas de software. Se Você quiser gerar programas usando coordenadas cartesianas, poderá alterar o driver padrão para Motoman Cartesian.
Mais informações sobre pós-processadores e como personalizá-los estão disponíveis na seção de pós-processadores.
Driver RoboDK para Yaskawa Motoman
Os drivers do robô oferecem uma alternativa à programação off-line. Com os drivers Yaskawa/Motoman, você pode mover um robô diretamente do RoboDK enquanto simula seu programa (Programação Online). Mais informações estão disponíveis na seção Robot Drivers.
Desde a versão 4.2 do RoboDK, você pode se conectar ao controlador do robô usando o driver do robô do RoboDK usando o protocolo High-Speed Ethernet Server (HSE) e o driver chamado MotomanHSE. Esse driver não requer que você tenha a opção de software MotoCom. Esse protocolo de comunicação (também chamado de "Remote") está disponível por padrão nos controladores de robôs Yaskawa mais recentes. Esse protocolo permite que você mova e monitore o robô a partir de um computador a uma taxa de atualização de 70 Hz.
Selecione Conectar – Conectar ao Robô, digite o IP do robô e selecione Conectar (Você pode ignorar a porta). Verifique se você está usando o caminho do driver mais recente que suporta o protocolo HSE (MotomanHSE).
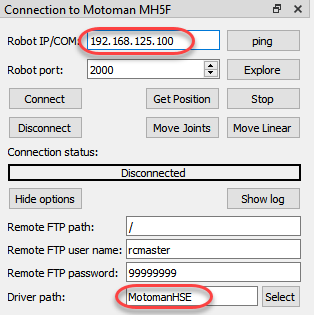
Para ativar esse modo de operação no robô, basta configurar o terminal de programação para o modo Remote.

Isso permite que você use a opção Executar no Robô do RoboDK para programação e depuração on-line. A conexão pode ser estabelecida por meio de uma conexão Ethernet padrão (TCP/IP - UDP).
A configuração deve ser feita automaticamente e não há necessidade de configurar nada específico no lado do controlador do robô.
Os seguintes controladores funcionam com o driver High-Speed Ethernet Server:
●DX100
●DX200
●FS100
●NX100
●YR1000
Uma conexão entre o RoboDK e qualquer robô Motoman também pode ser estabelecida para mover o robô automaticamente a partir de um PC conectado usando o RoboDK e a opção de software MotoCom da Motoman e o driver apimotoman.
Atualizar informações de pulsos por grau
Os robôs Yaskawa Motoman requerem o conhecimento da relação de pulsos por grau para todos os eixos do robô para converter os valores angulares da junta em pulsos e vice-versa. O RoboDK gera automaticamente programas com as informações de pulso corretas se a relação de pulsos por grau for fornecida corretamente nos parâmetros do robô.
Você pode carregar o arquivo ALL.PRM do seu controlador Yaskawa Motoman no RoboDK para extrair automaticamente a relação pulsos/grau. O arquivo ALL.PRM deve estar disponível quando você realizar um backup completo do controlador. As etapas a seguir demonstram o procedimento a ser usado nesse caso:
1.Abra seu robô no RoboDK.
2.Arraste e solte o arquivo ALL.PRM no RoboDK para abri-lo.
3.Aceite as alterações e você verá as informações de pulsos/graus atualizadas para o seu robô. Você poderá ver uma mensagem de aviso se não tiver selecionado o robô correto.
4.As informações de pulsos/graus são salvas com o arquivo de projeto RDK. Você também pode salvar o robô clicando com o botão direito do mouse sobre ele e selecionando Salvar como... e substituir esse robô em outros projetos clicando com o botão direito do mouse sobre um robô e selecionando Substituir robô.
Siga estas etapas para verificar se essas informações estão disponíveis para o seu robô (ou para atualizá-las):
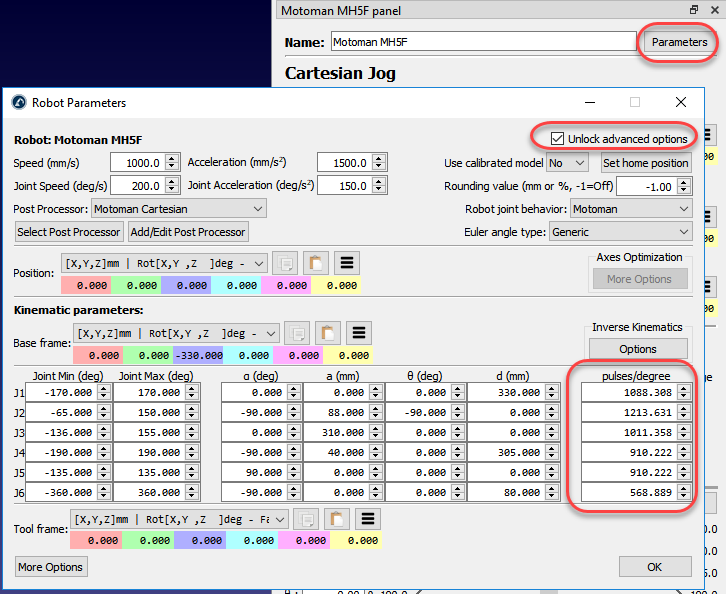
1.Clique duas vezes em seu robô Yaskawa Motoman no RoboDK
2.Selecionar parâmetros
3.Selecione Desbloquear opções avançadas
4.Revisar ou atualizar os valores de pulsos/graus para cada articulação
Quando essas informações estiverem atualizadas, você poderá gerar seus programas com as informações corretas de pulsos/graus.