Configuração do Listen Node
Você pode executar programas em seu robô Omron-TM diretamente do RoboDK usando o driver do RoboDK para o Omron-TM. Você também pode gerar programas como arquivos de script que são transmitidos via protocolo TCP/IP. Em ambos os casos, você deve se certificar de que o robô esteja em um Listen Node. Esta seção descreve como configurar a comunicação no RoboDK e no robô Omron-TM.
É possível selecionar entre diferentes pós-processadores ou personalizar os pós-processadores para definir a maneira como os programas são gerados off-line e executados (por exemplo, para suportar uma pinça ou sensores externos).
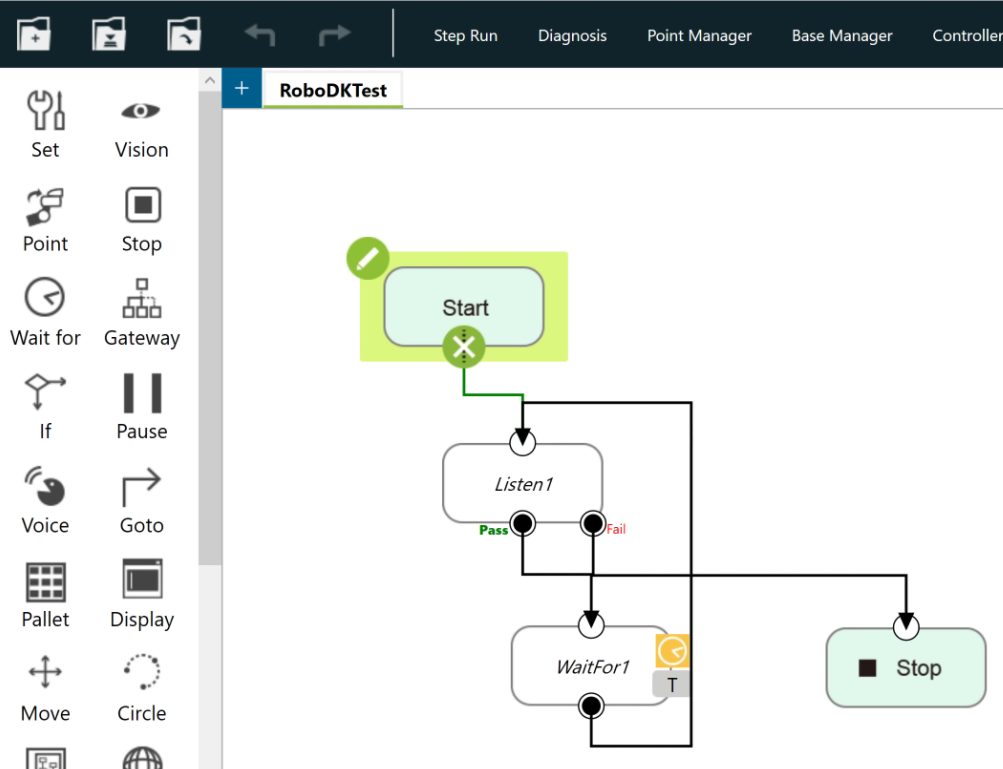
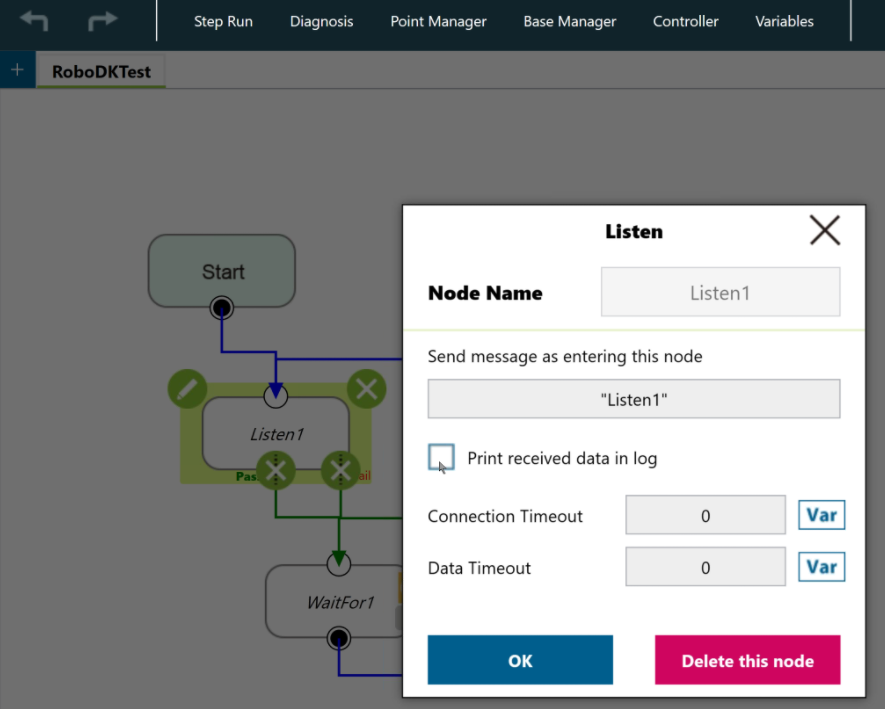
Para que o robô se mova remotamente, ele precisa estar no modo Listen. Isso é feito por meio de um Listen Node. A imagem a seguir mostra um fluxo de trabalho de programa sugerido para ter um programa que executa automaticamente o programa enviado pelo RoboDK. Recomenda-se selecionar Print received data in log (Imprimir dados recebidos no registro) para solucionar problemas.
Siga estas etapas para configurar a comunicação no RoboDK e executar um programa:
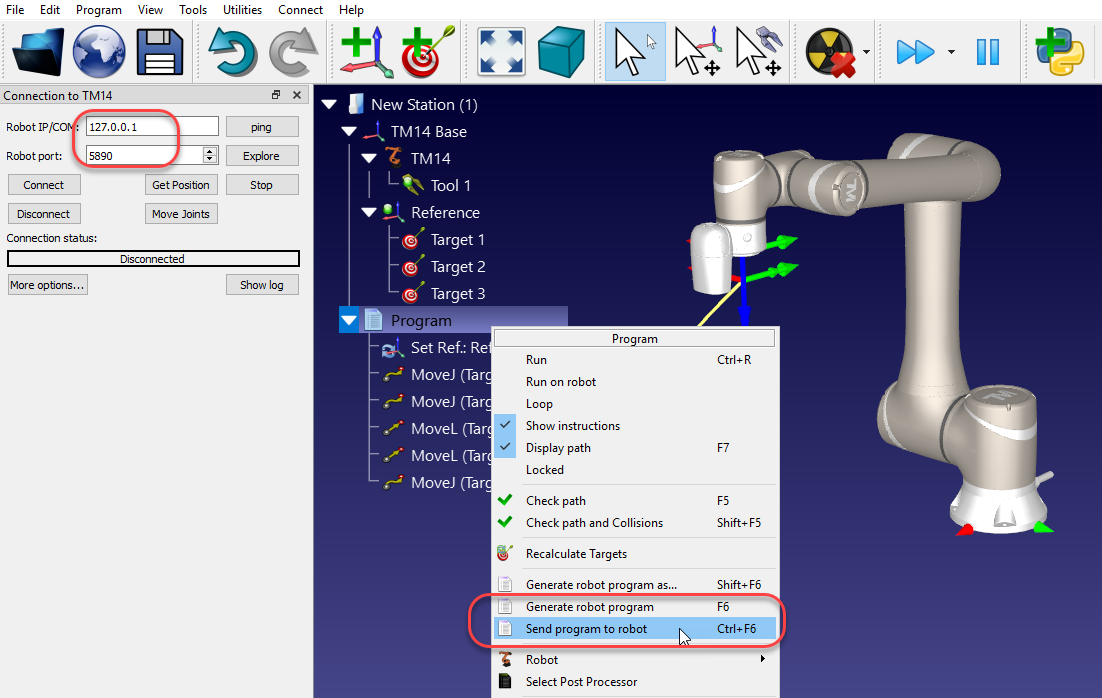
1.Selecione Conectar➔ Conectar robô
2.Digite o IP do robô
3.Digite a porta 5890
4.Clique com o botão direito do mouse em seu programa
5.Selecione Gerar programa do robô F6.