Transferir um arquivo via USB
Usando o pós-processador padrão, você obterá o programa como um arquivo ZIP. Você deve preparar uma unidade USB com as seguintes características para carregar corretamente o arquivo no robô:
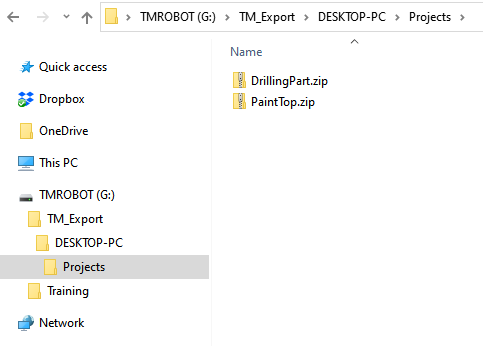
1.Nomeie a unidade USB como TMROBOT (esta etapa é importante).
2.Crie uma nova pasta chamada TM_Export na raiz de sua unidade.
3.Crie uma nova pasta dentro de TM_Export com seu projeto (qualquer nome deve funcionar).
4.Crie uma nova pasta dentro da pasta anterior chamada Projects (Projetos).
5.Coloque os programas ZIP dentro da pasta Projects (Projetos).
Siga estas etapas para carregar o programa no TMFlow:
1.Salve o arquivo ZIP criado a partir do RoboDK na unidade USB, na pasta, seguindo as etapas anteriores.
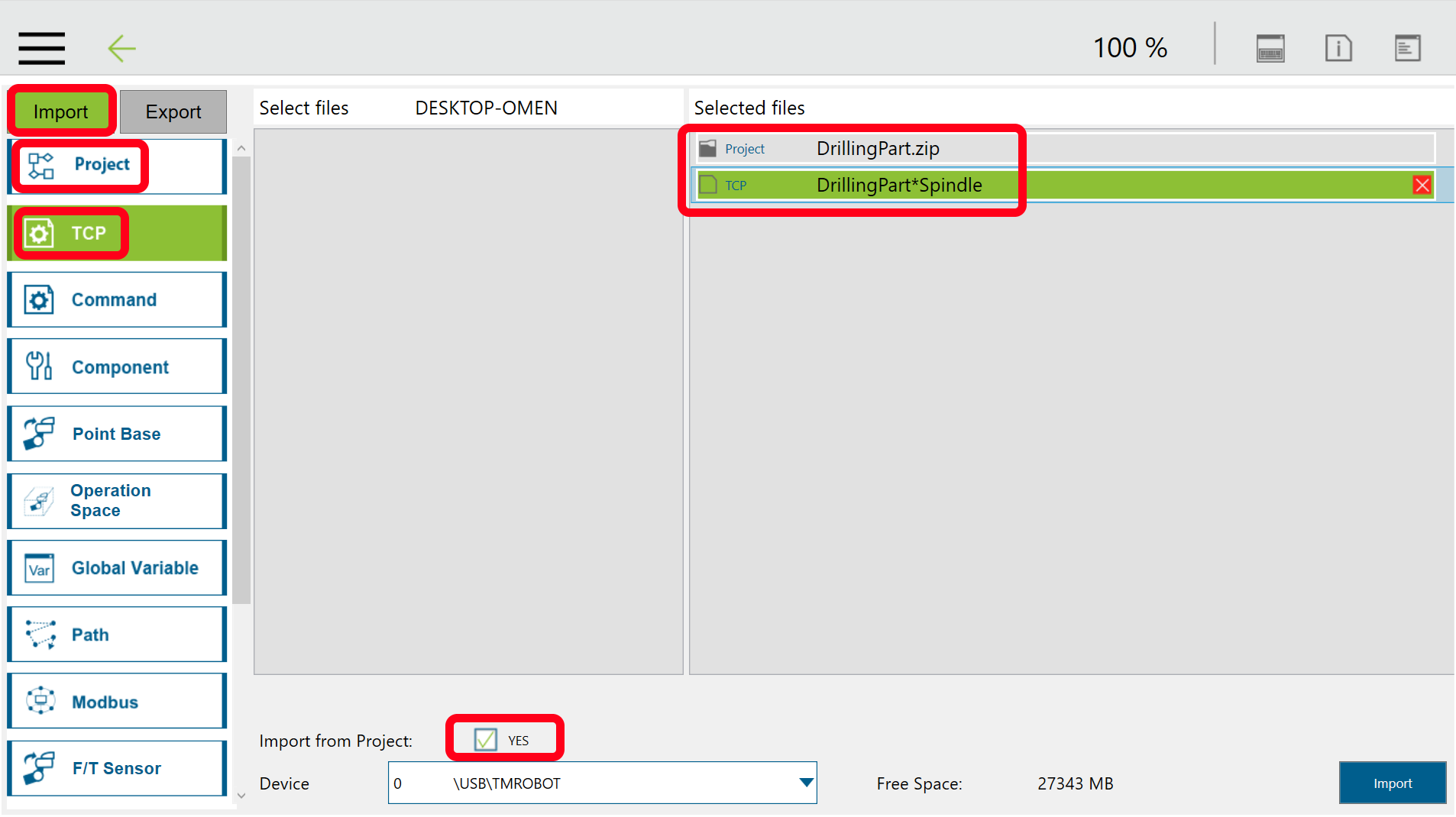
2.Selecione o menu principal➔ System➔ Import/Export
3.Selecione Import e selecione sua pasta em TM_Export
4.Selecione Project (Projeto) e selecione seu(s) programa(s) ZIP.
5.Selecione TCP
6.Marque a opção Import from Project (Importar do projeto)➔ Yes
7.Selecione seu programa e selecione as ferramentas em seu programa para garantir que as carregue.
8.Selecione Importar
Seu programa agora estará disponível quando você selecionar a opção de abrir novos programas.