Robôs Omron-TM
Os robôs Omron-TM podem ser programados off-line a partir do RoboDK usando arquivos ZIP do TMFlow. Você também pode usar o driver do robô quando o robô estiver em um Listen Node para mover o robô diretamente do RoboDK em tempo real.
Transferir um arquivo via USB
Usando o pós-processador padrão, você obterá o programa como um arquivo ZIP. Você deve preparar uma unidade USB com as seguintes características para carregar corretamente o arquivo no robô:
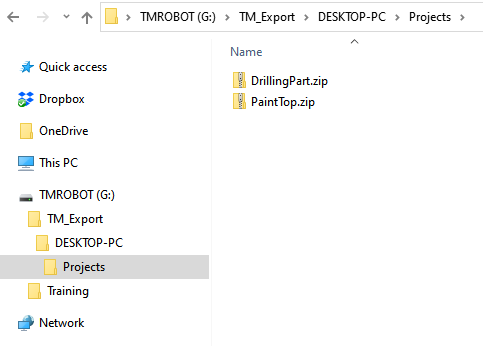
1.Nomeie a unidade USB como TMROBOT (esta etapa é importante).
2.Crie uma nova pasta chamada TM_Export na raiz de sua unidade.
3.Crie uma nova pasta dentro de TM_Export com seu projeto (qualquer nome deve funcionar).
4.Crie uma nova pasta dentro da pasta anterior chamada Projects (Projetos).
5.Coloque os programas ZIP dentro da pasta Projects (Projetos).
Siga estas etapas para carregar o programa no TMFlow:
1.Salve o arquivo ZIP criado a partir do RoboDK na unidade USB, na pasta, seguindo as etapas anteriores.
2.Selecione o menu principal➔ System➔ Import/Export
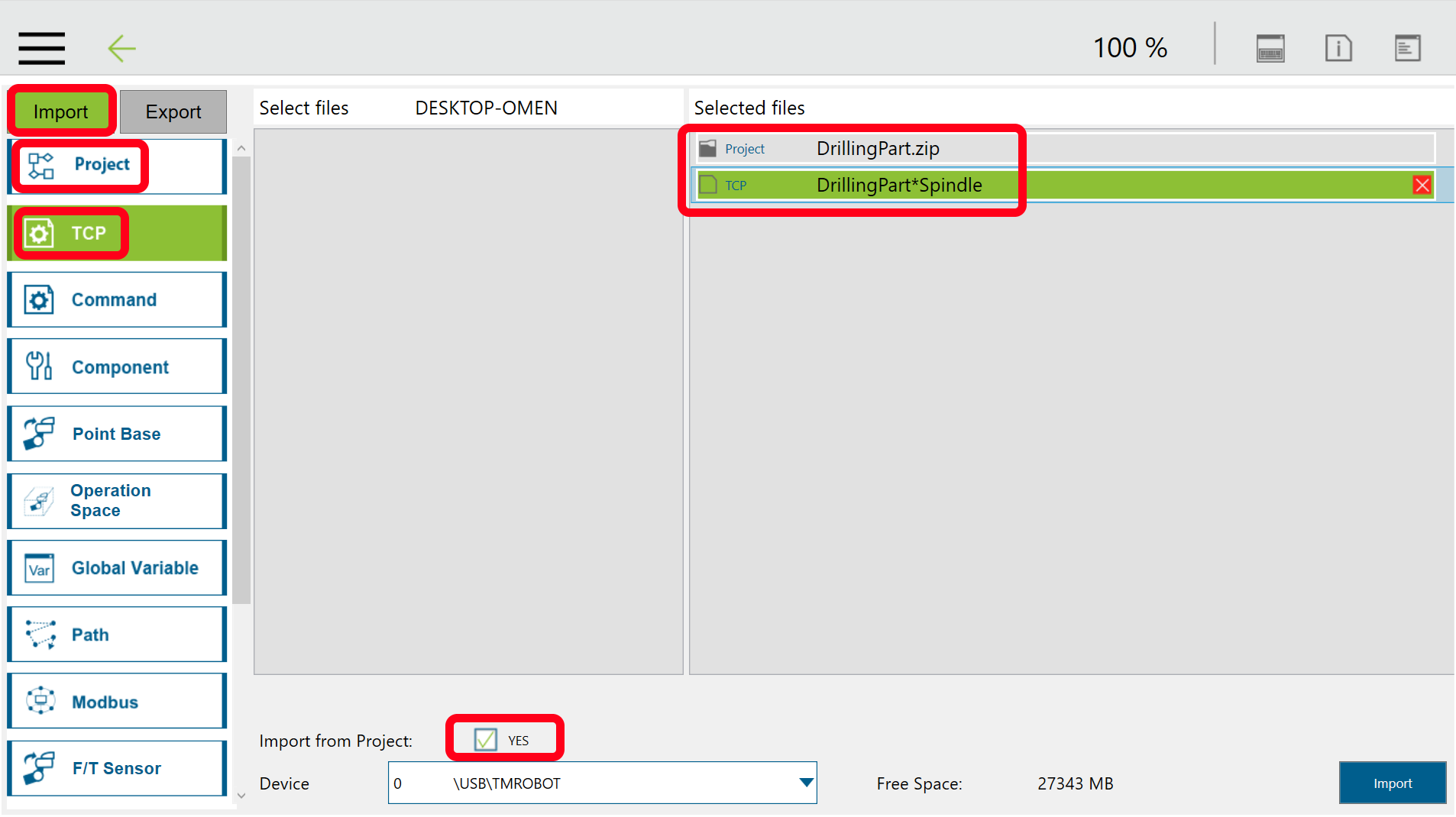
3.Selecione Import e selecione sua pasta em TM_Export
4.Selecione Project (Projeto) e selecione seu(s) programa(s) ZIP.
5.Selecione TCP
6.Marque a opção Import from Project (Importar do projeto)➔ Yes
7.Selecione seu programa e selecione as ferramentas em seu programa para garantir que as carregue.
8.Selecione Importar
Seu programa agora estará disponível quando você selecionar a opção de abrir novos programas.
Configuração do Listen Node
Você pode executar programas em seu robô Omron-TM diretamente do RoboDK usando o driver do RoboDK para o Omron-TM. Você também pode gerar programas como arquivos de script que são transmitidos via protocolo TCP/IP. Em ambos os casos, você deve se certificar de que o robô esteja em um Listen Node. Esta seção descreve como configurar a comunicação no RoboDK e no robô Omron-TM.
É possível selecionar entre diferentes pós-processadores ou personalizar os pós-processadores para definir a maneira como os programas são gerados off-line e executados (por exemplo, para suportar uma pinça ou sensores externos).
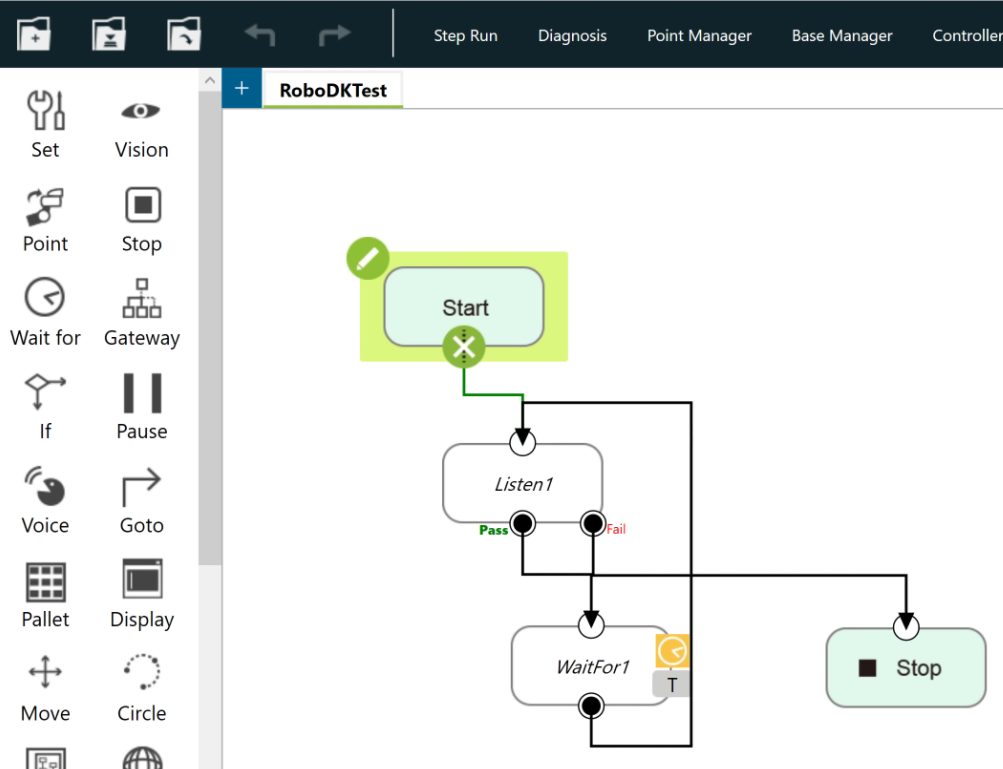
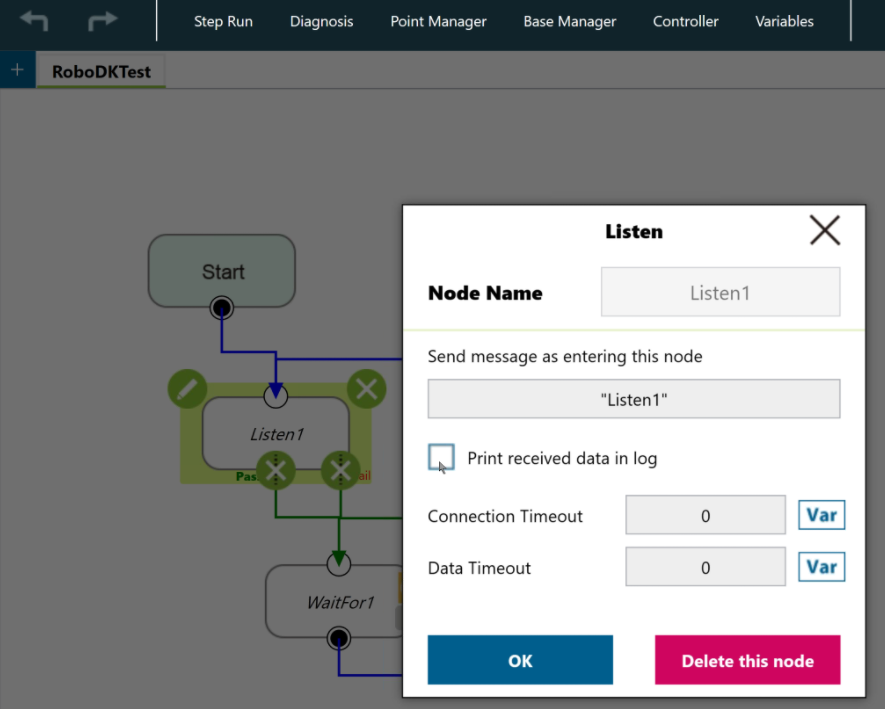
Para que o robô se mova remotamente, ele precisa estar no modo Listen. Isso é feito por meio de um Listen Node. A imagem a seguir mostra um fluxo de trabalho de programa sugerido para ter um programa que executa automaticamente o programa enviado pelo RoboDK. Recomenda-se selecionar Print received data in log (Imprimir dados recebidos no registro) para solucionar problemas.
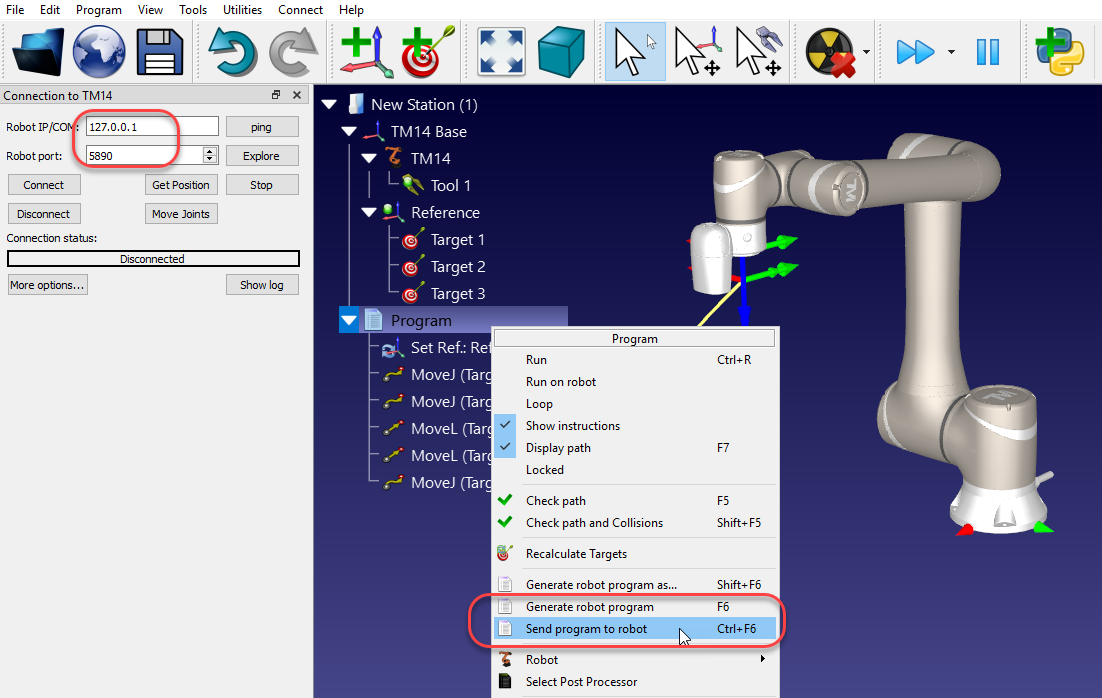
Siga estas etapas para configurar a comunicação no RoboDK e executar um programa:
1.Selecione Conectar➔ Conectar robô
2.Digite o IP do robô
3.Digite a porta 5890
4.Clique com o botão direito do mouse em seu programa
5.Selecione Gerar programa do robô F6.