Atualizar a cinemática do robô
Seguir as etapas desta seção é opcional e necessário apenas em determinadas circunstâncias, quando a precisão é necessária na programação off-line. Esta seção explica como inserir os valores cinemáticos exclusivos do seu robô UR no RoboDK para simular o robô com precisão.
A cinemática do controlador UR é exclusiva para cada robô. As cinemáticas são as dimensões que definem o robô na forma da tabela DH (Denavit Hartenberg). O simulador RoboDK usa a cinemática UR nominal por padrão, portanto, você pode ver uma discrepância de 2 mm a 10 mm entre a cinemática do simulador e a cinemática do controlador.
Para que a simulação corresponda exatamente ao robô real, você pode importar a cinemática específica do seu robô UR simplesmente abrindo um arquivo URP criado com o terminal de programação.
Você também pode carregar o arquivo URP manualmente seguindo este procedimento:
1.Recupere um arquivo URP gerado usando o robô real (não usando o RoboDK ou o simulador UR)
2.Abra seu robô no RoboDK. Você encontrará seu robô UR na biblioteca do RoboDK. Você também pode usar um robô UR disponível em uma de suas estações RoboDK existentes.
3.Selecione Ferramentas-Executar Script
4.Selecione UR_LoadControllerKinematics
5.Selecione o arquivo URP extraído do controlador do robô.
Você deverá ver uma mensagem como a mostrada na imagem a seguir. Você poderá ver uma mensagem de aviso se não tiver carregado um arquivo URP válido ou se não tiver selecionado o robô UR correto.
Quando esse procedimento for concluído, você pode clicar com o botão direito do mouse em um robô e selecionar Salvar como .robot. Esses parâmetros são salvos com o arquivo do robô e você pode usar o arquivo do robô em vez de repetir esse procedimento para cada novo projeto.
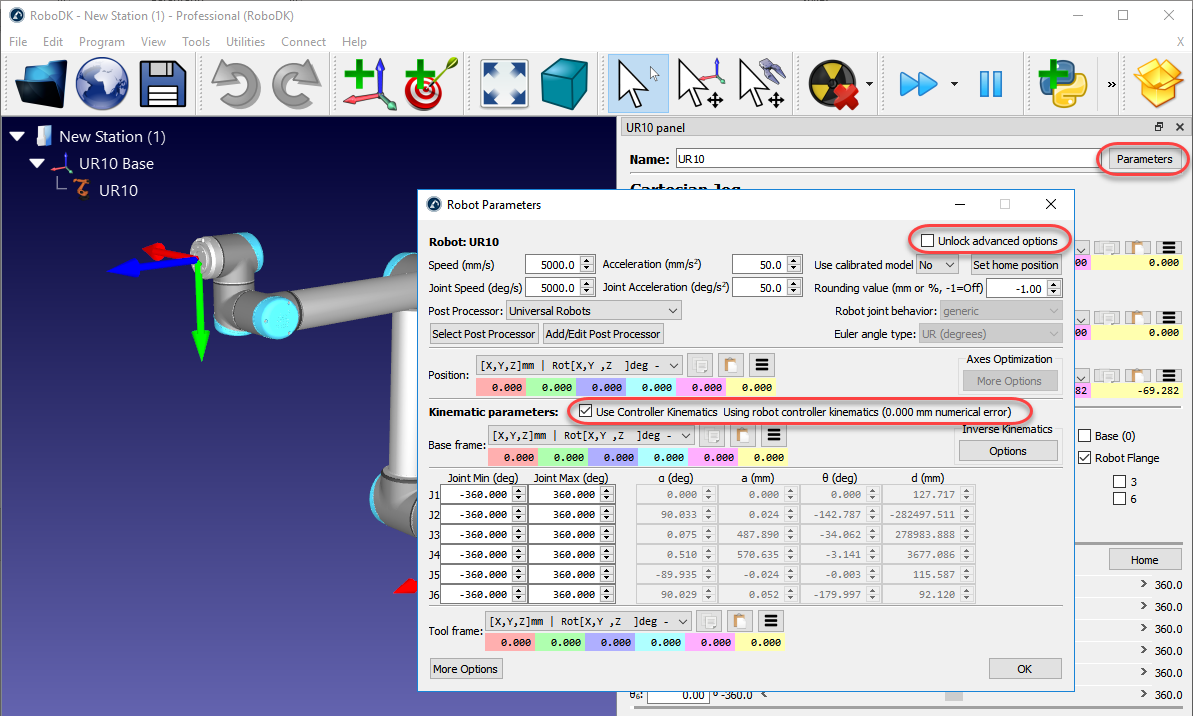
O RoboDK extrai as informações específicas do seu robô a partir do arquivo URP e as leva em consideração para a simulação e a programação off-line no arquivo do robô. Você pode alterar essa configuração e reverter para a cinemática padrão no menu de parâmetros do robô, conforme mostrado na imagem a seguir.
Você perceberá que as informações de pose exibidas no terminal de programação correspondem à cinemática exibida no RoboDK (certifique-se de remover o quadro da ferramenta e o quadro de referência no RoboDK e no robô UR para fazer a comparação).
A cinemática UR muda de um robô para outro porque cada robô é calibrado na fábrica pela UR. Outros fornecedores de robôs, como KUKA, ABB, Motoman ou Fanuc, não calibram seus robôs, a menos que você adquira a opção chamada Absolute Accuracy (Precisão absoluta). As opções de Precisão Absoluta podem levar em conta até 40 parâmetros de calibração ou mais.
Esse procedimento não é o mesmo que a calibração do robô do RoboDK. A calibração do robô ajuda a melhorar a precisão do robô real.