Guia de instalação do URSim
O URSim permite que você emule o comportamento do controlador real do robô Universal Robots no seu computador. Isso permite que você se familiarize com o controlador e teste os programas que gera usando o RoboDK. Esta seção o guiará na instalação do URSim.
Faça o download dos requisitos do URSim
Você deve fazer o download da imagem oficial do URSim no site da Universal Robots e do Oracle VM VirtualBox nos sites oficiais.
1.Faça o download do Offline Simulator mais atualizado para não Linux a partir deste link: https://www.universal-robots.com/download/?query=.
3.Instale o software Oracle VM VirtualBox a partir do seguinte link: https://www.virtualbox.org/wiki/Downloads.
4.Crie uma pasta em seu disco rígido e dê a ela o nome de URSim.
5.Extraia o conteúdo do arquivo zip do URSim baixado para a pasta URSim.
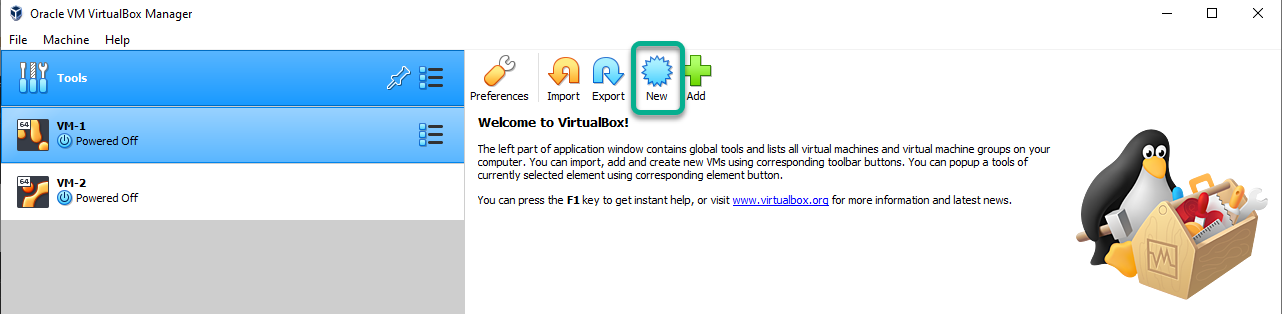
6.Inicie o Oracle VM VirtualBox.
VirtualBox
Esta seção mostra como Você pode criar uma nova máquina virtual usando o Oracle VM VirtualBox para simular o controlador Universal Robots.
Siga estas etapas para criar uma nova máquina Linux e carregar a imagem do controlador baixada:
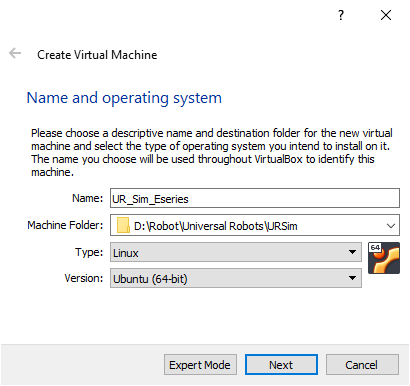
1.Inicie o VirtualBox e pressione "New" (Novo).
2.Defina o nome como UR_Sim_Eseries e defina a pasta Machine como a pasta que você criou.
Defina o tipo como Linux e a versão como Ubuntu (64 bits).
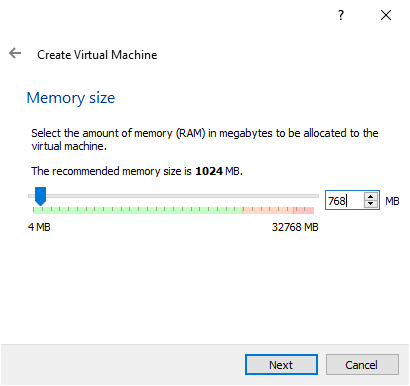
3.Defina o tamanho da memória como 768 MB e pressione "Next".
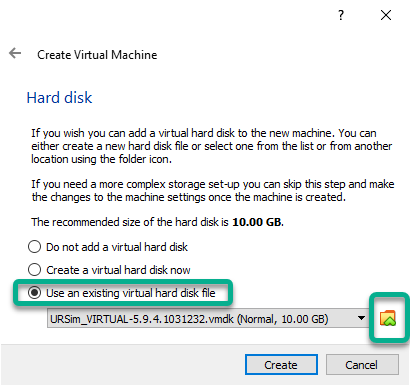
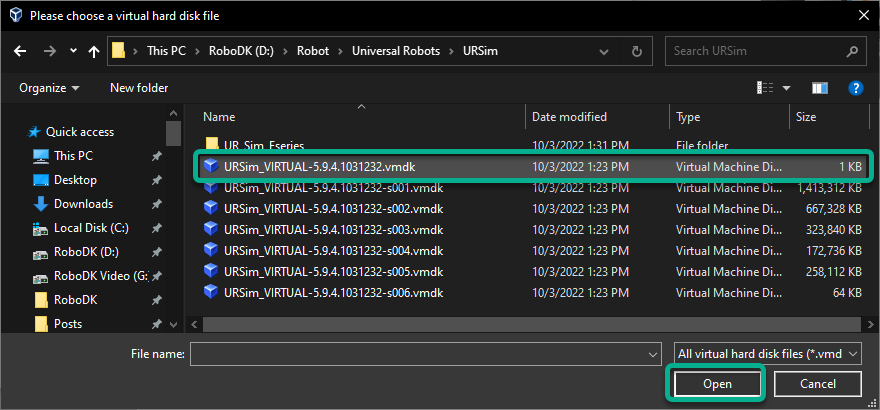
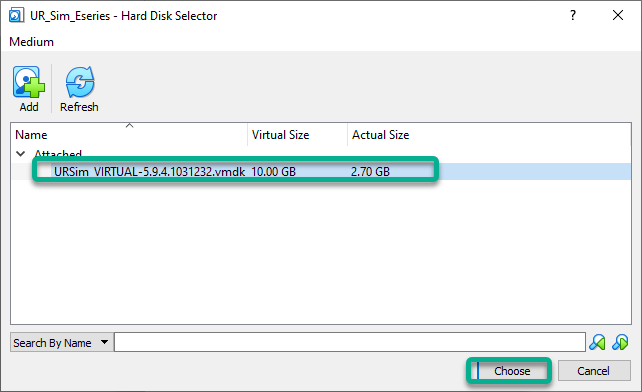
4.Selecione Usar um arquivo de disco rígido virtual existente e defina o caminho para a pasta em que o arquivo compactado foi descompactado. Pressione Criar.
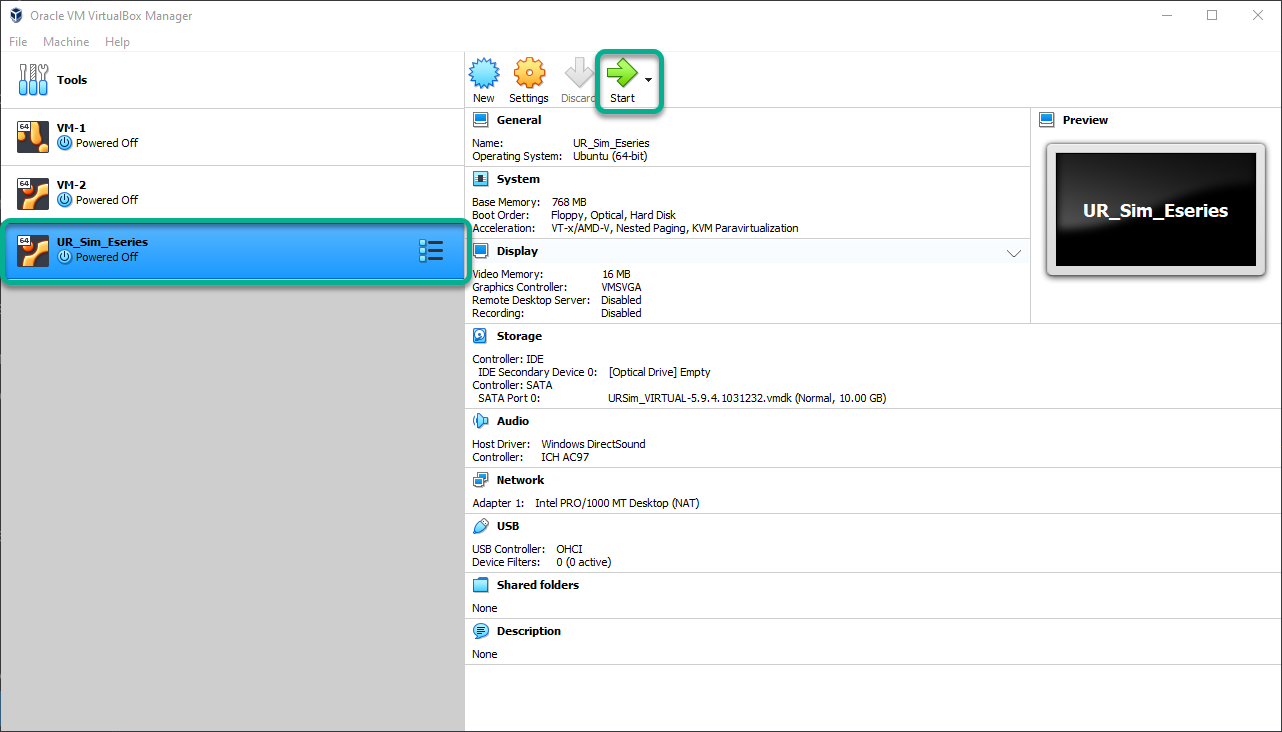
5.Pressione "Start" para iniciar a máquina virtual.
6.Se for exibido um erro dizendo “A aceleração de hardware não está disponível”, talvez seja necessário reiniciar o computador e alterar uma configuração do BIOS para ativar a virtualização. Com a virtualização ativada, você poderá reiniciar o Windows, o VirtualBox e a máquina virtual.
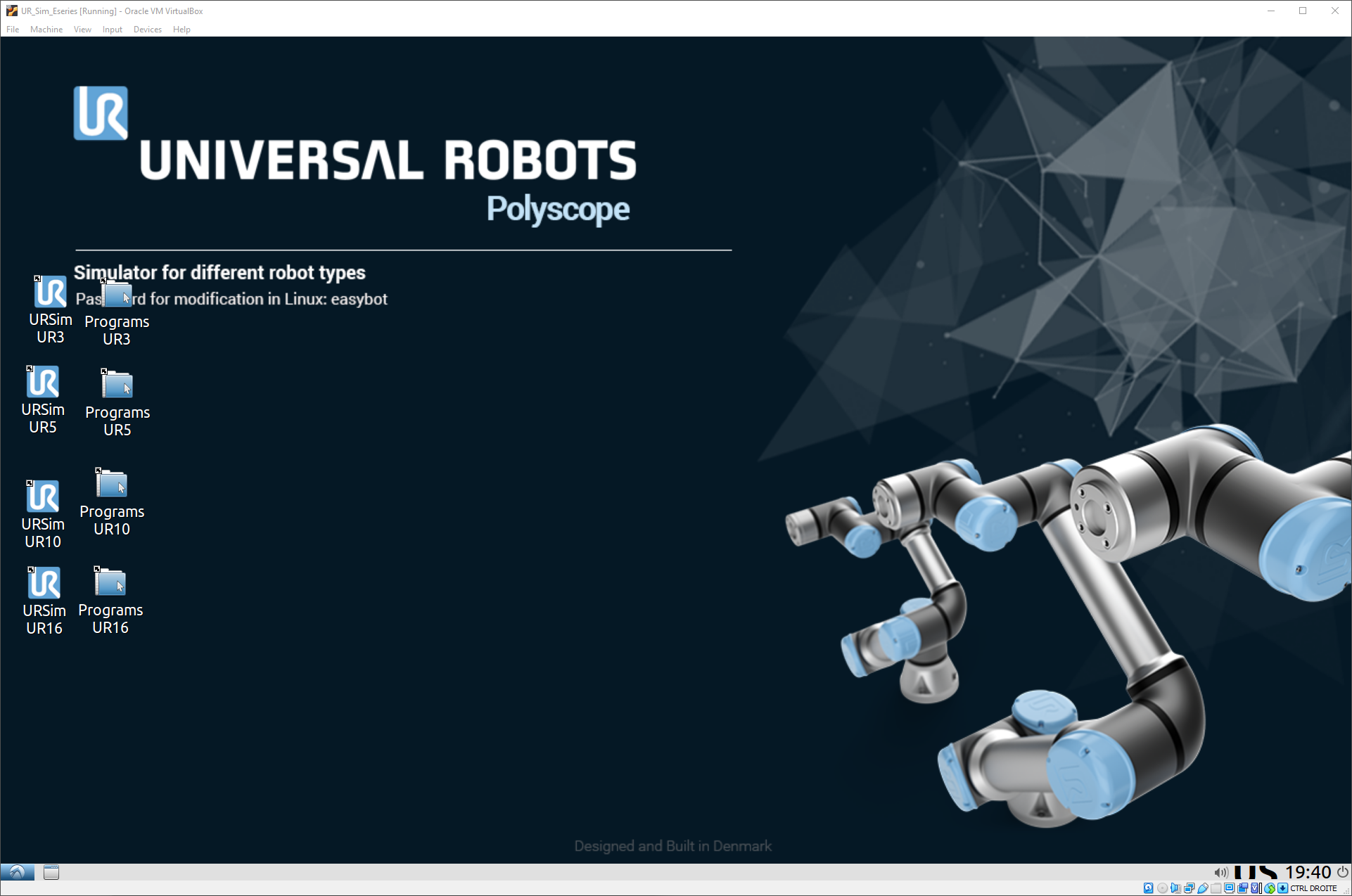
7.A máquina virtual deve começar a funcionar.
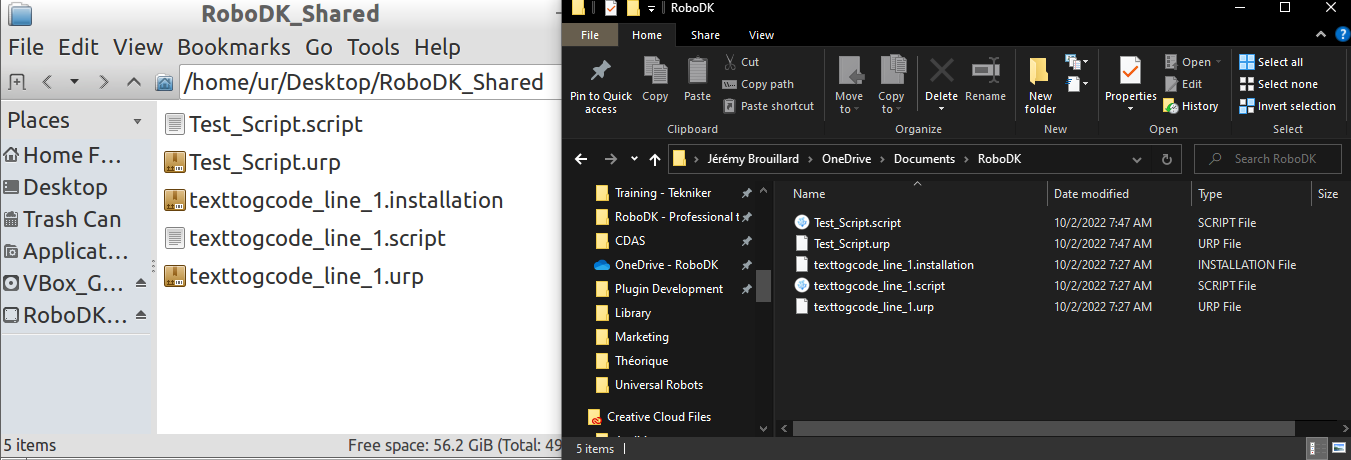
Pasta compartilhada entre o Windows e o URSim
Opcionalmente, você pode configurar uma pasta compartilhada entre o computador Windows e o controlador emulado para transferir facilmente os arquivos de programa.
Siga estas etapas para mapear a pasta de programas do RoboDK com uma nova pasta no controlador do robô UR emulado:
1.Esta seção explica como ter uma pasta compartilhada entre o Windows e o URSim para transferir programas.
2.Abra a VM do URSim.
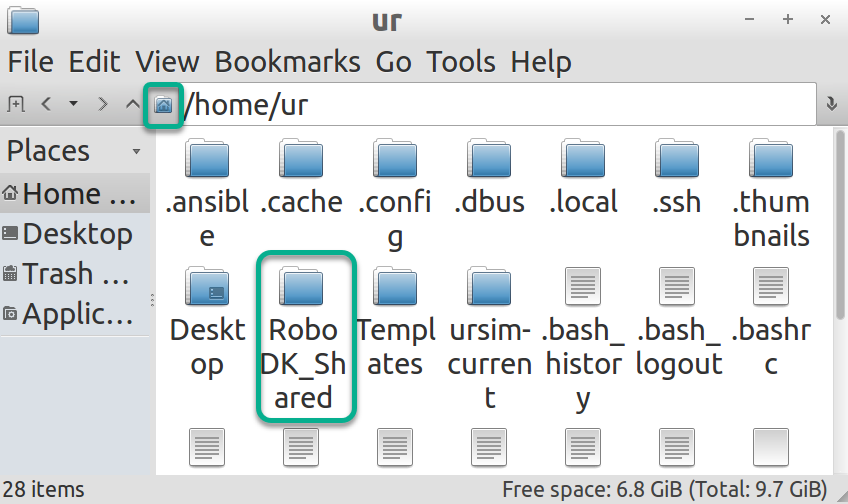
3.Crie uma pasta no Linux Ubuntu e nomeie-a "RoboDK_Shared" em "/home/ur/".
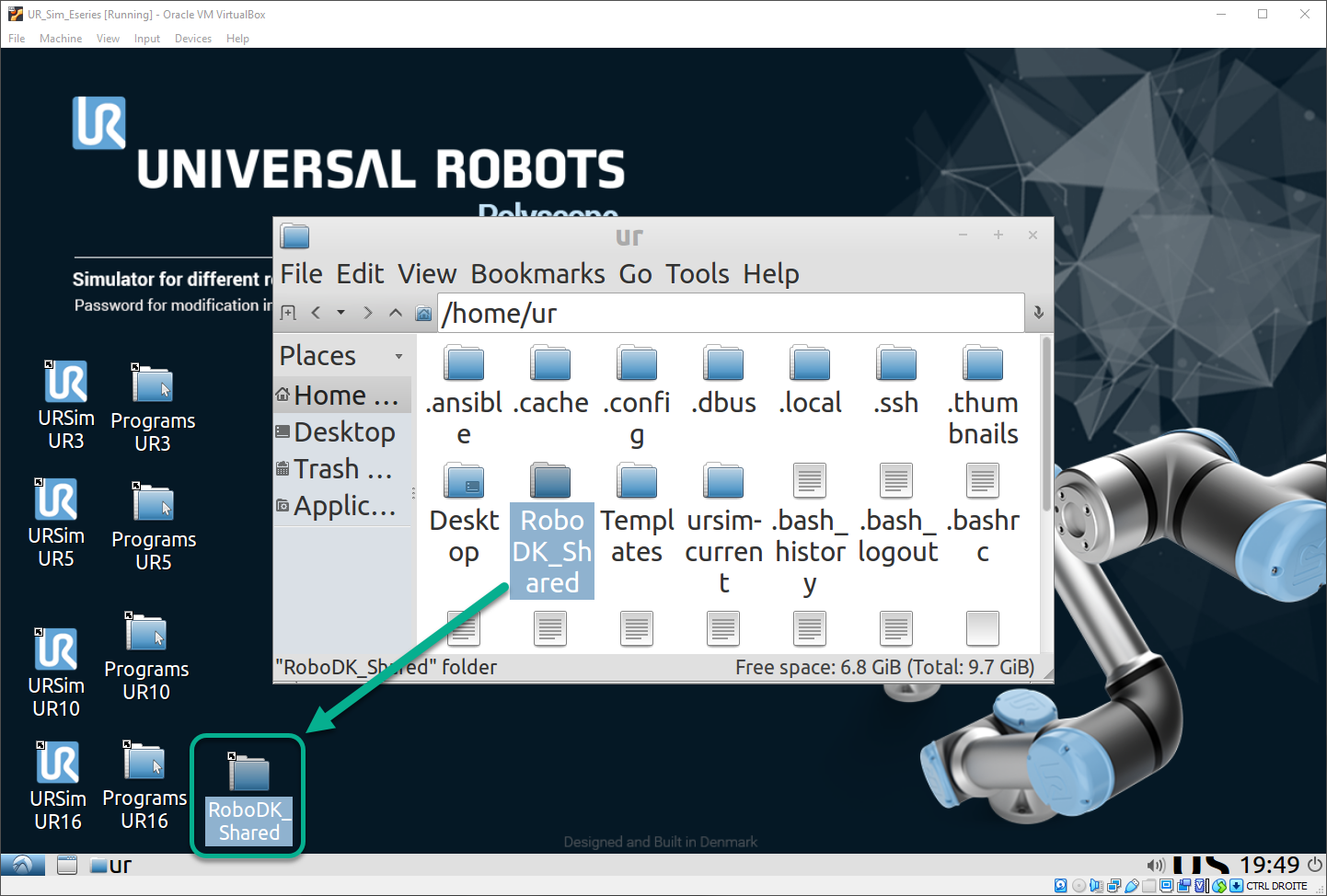
4.Crie um atalho na área de trabalho arrastando e soltando a pasta "RoboDK_Shared" na área de trabalho.
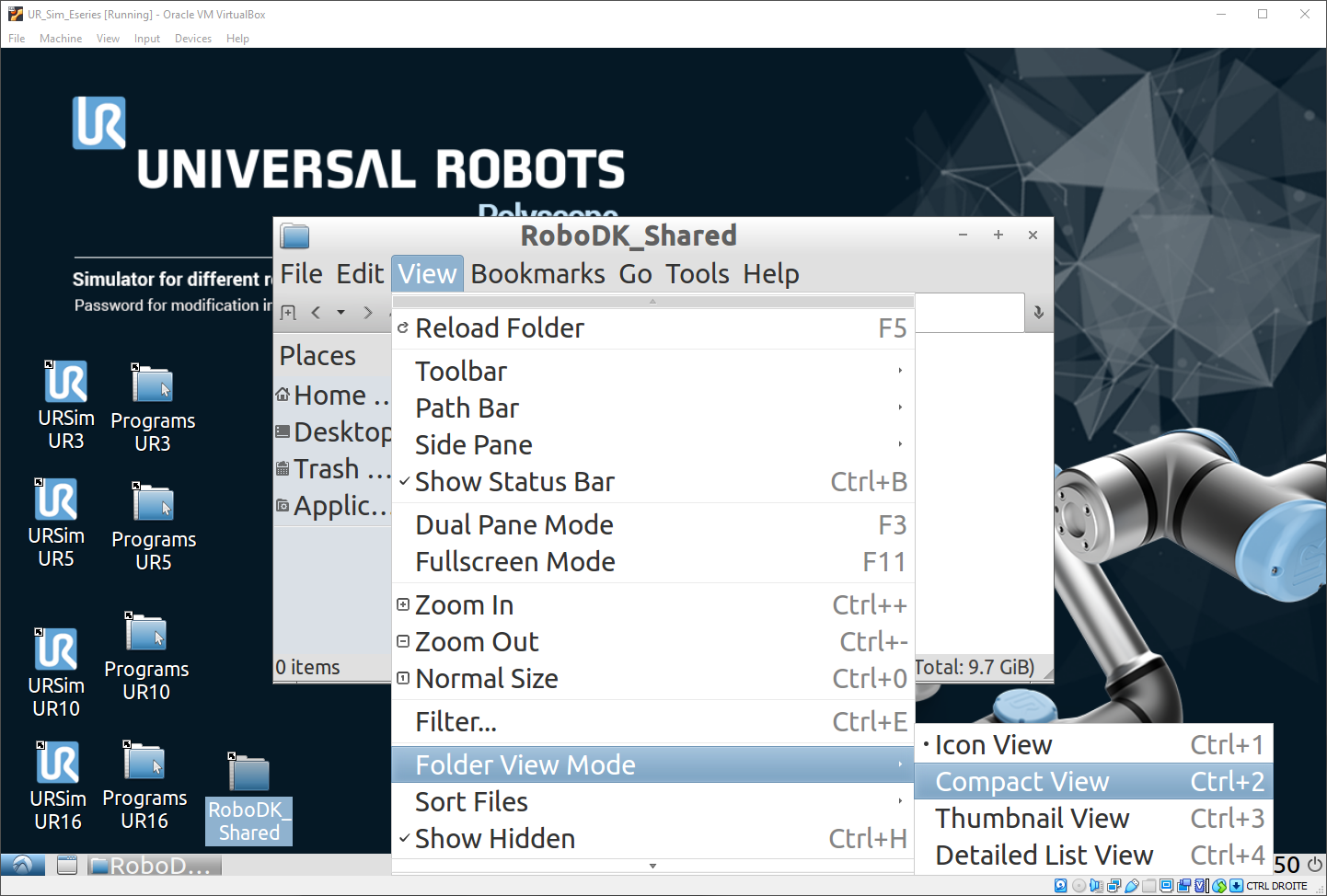
5.Abra o RoboDK_Shared.
6.Selecione View (Exibir)➔ Folder View Mode (Modo de exibição de pasta)➔ Compact View (Exibição compacta).
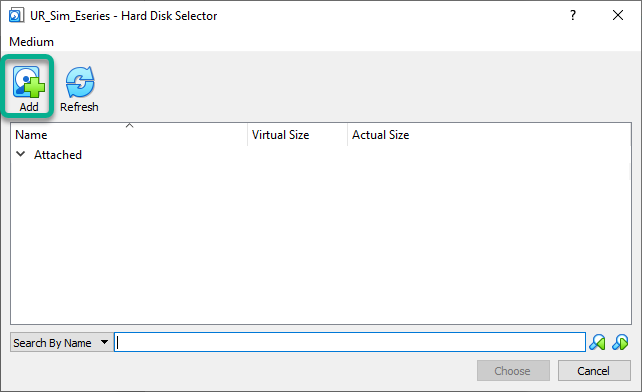
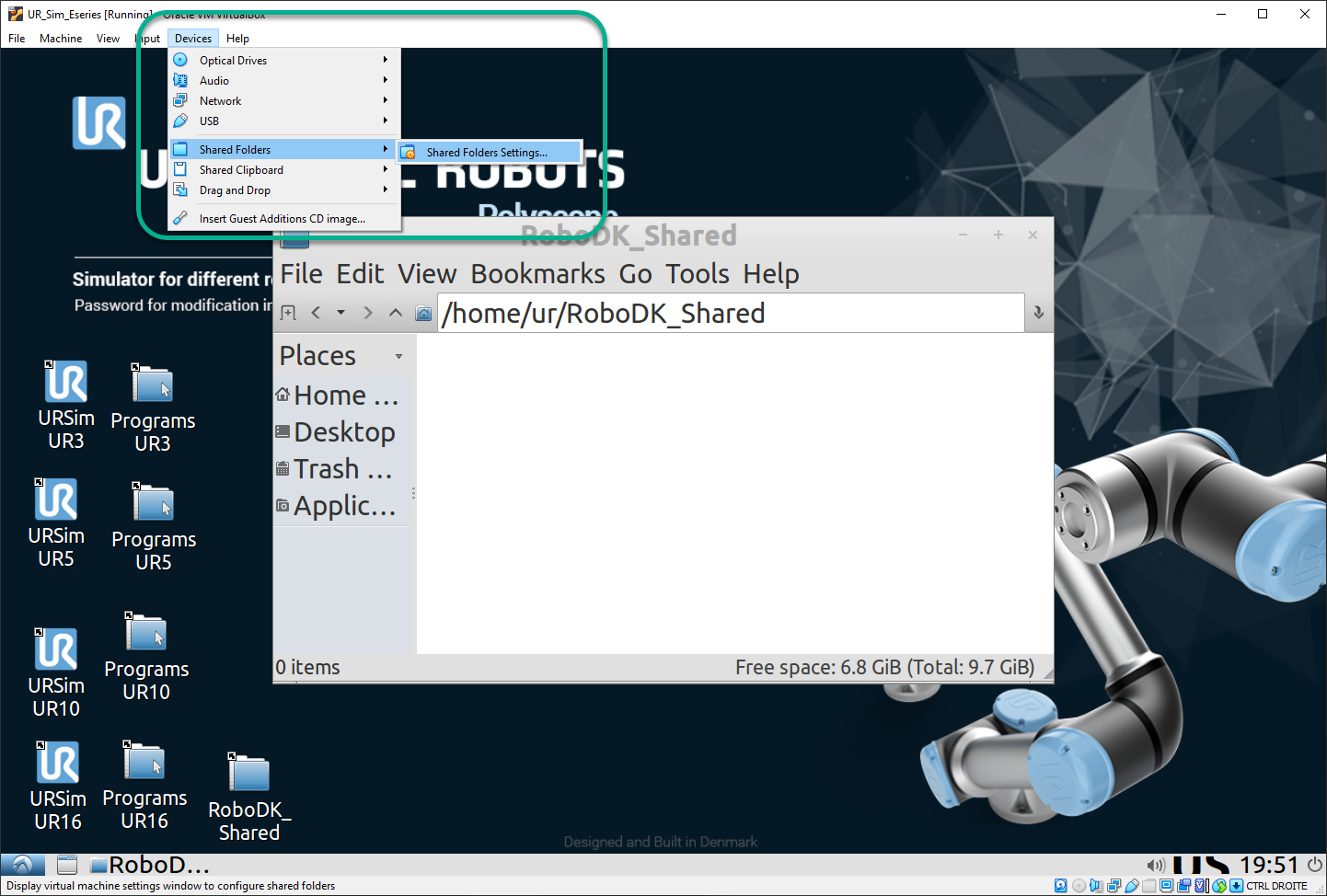
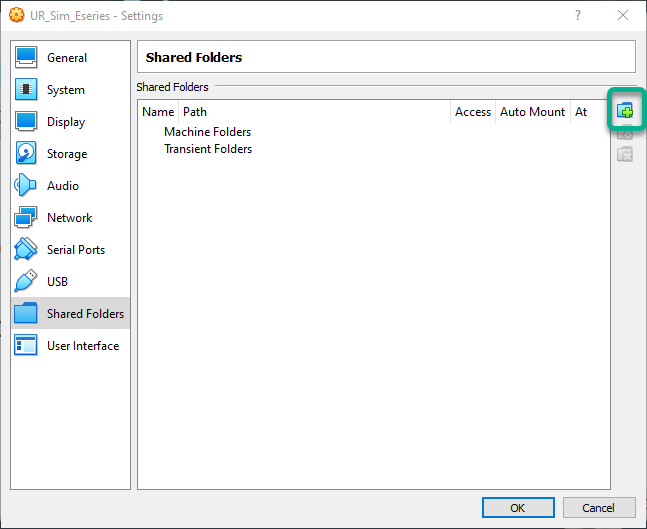
7.No menu superior da janela do VirtualBox, selecione Devices (Dispositivos)➔ Shared Folders (Pastas compartilhadas)➔ Shared Folders Settings (Configurações de pastas compartilhadas).
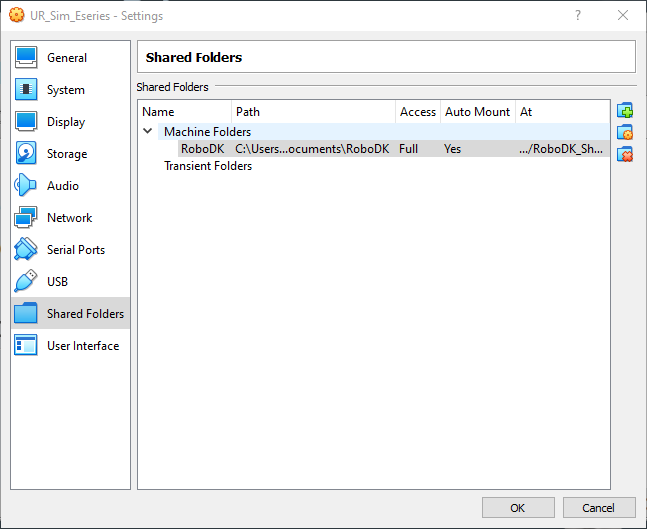
8.Add-in uma nova pasta compartilhada usando o botão mostrado na imagem a seguir.
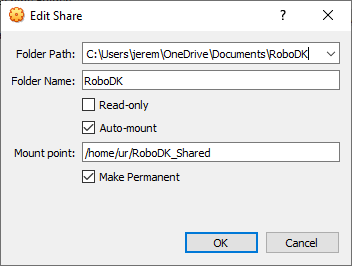
9.Selecione o caminho para a pasta compartilhada no Windows (Você pode usar qualquer pasta do seu computador).
10.Marque " Montagem automática " e "Tornar permanente".
11.Ponto de montagem: /home/ur/RoboDK_Shared
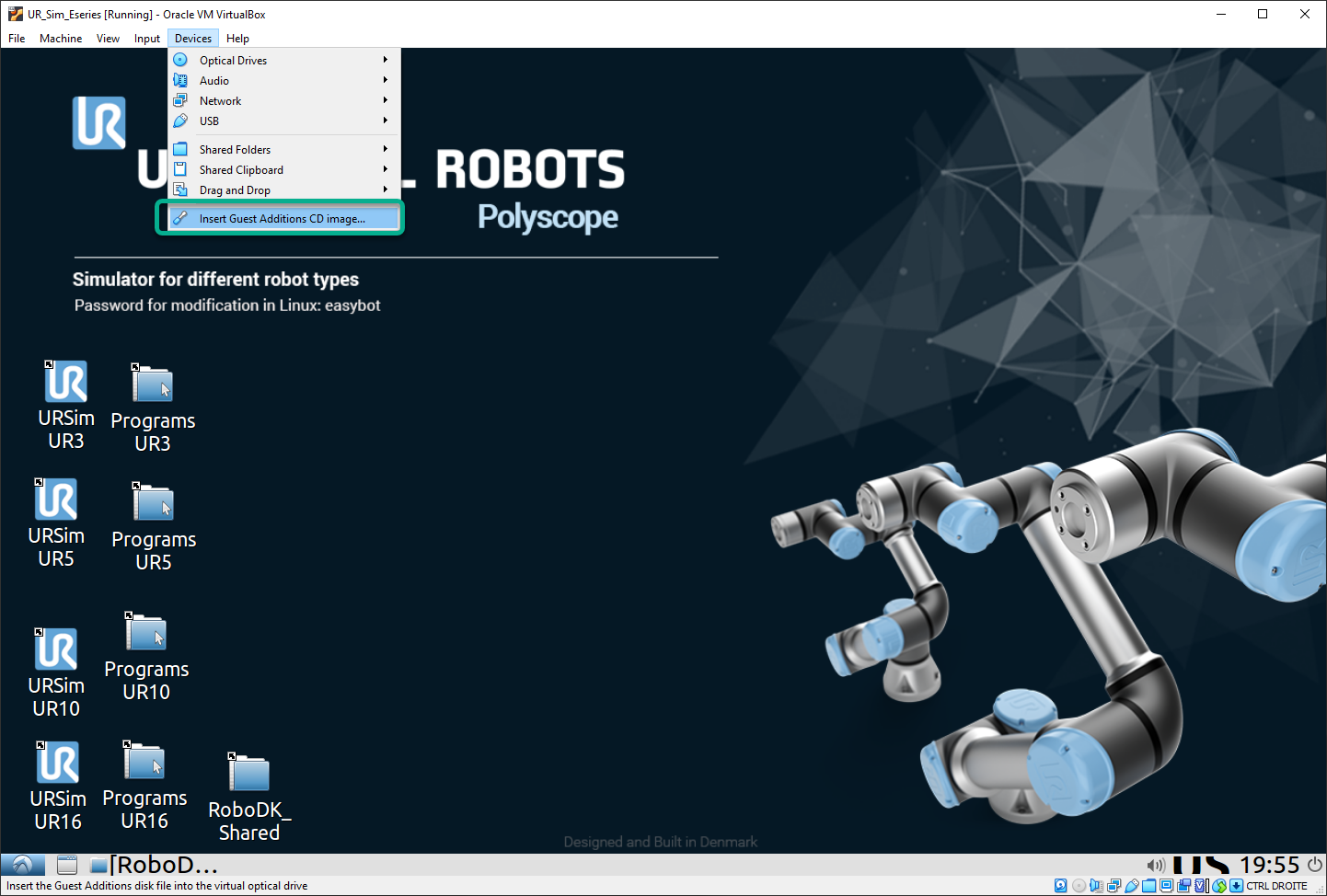
12.No menu superior do VirtualBox, selecione Dispositivos ➔ Inserir imagem de CD de Adicional para convidados.
13.Selecione "Abrir no gerenciador de arquivos" e pressione "OK".
14.Abra a pasta para: /media/ur/VBox_Gas_6.1.38 (a versão do VBox pode variar).
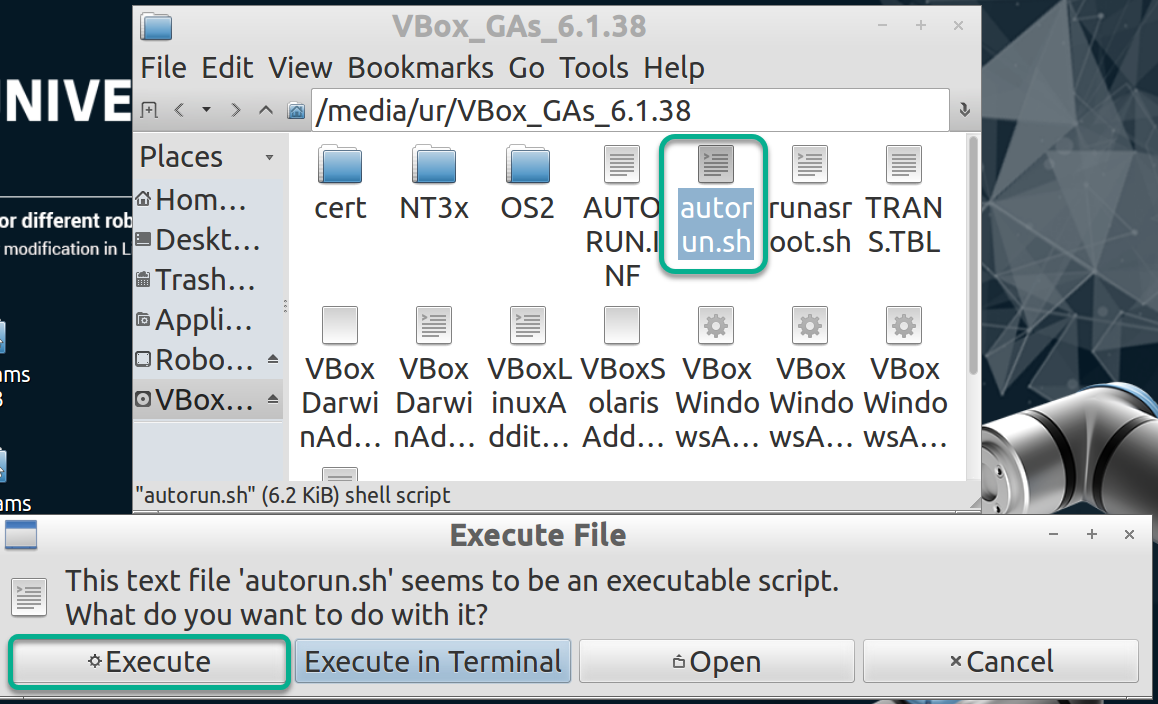
15.Clique duas vezes no arquivo "autorun.sh" e selecione "Execute" (a senha é "easybot"). O script pode demorar um pouco para ser executado.
16.Reinicialize a máquina virtual.
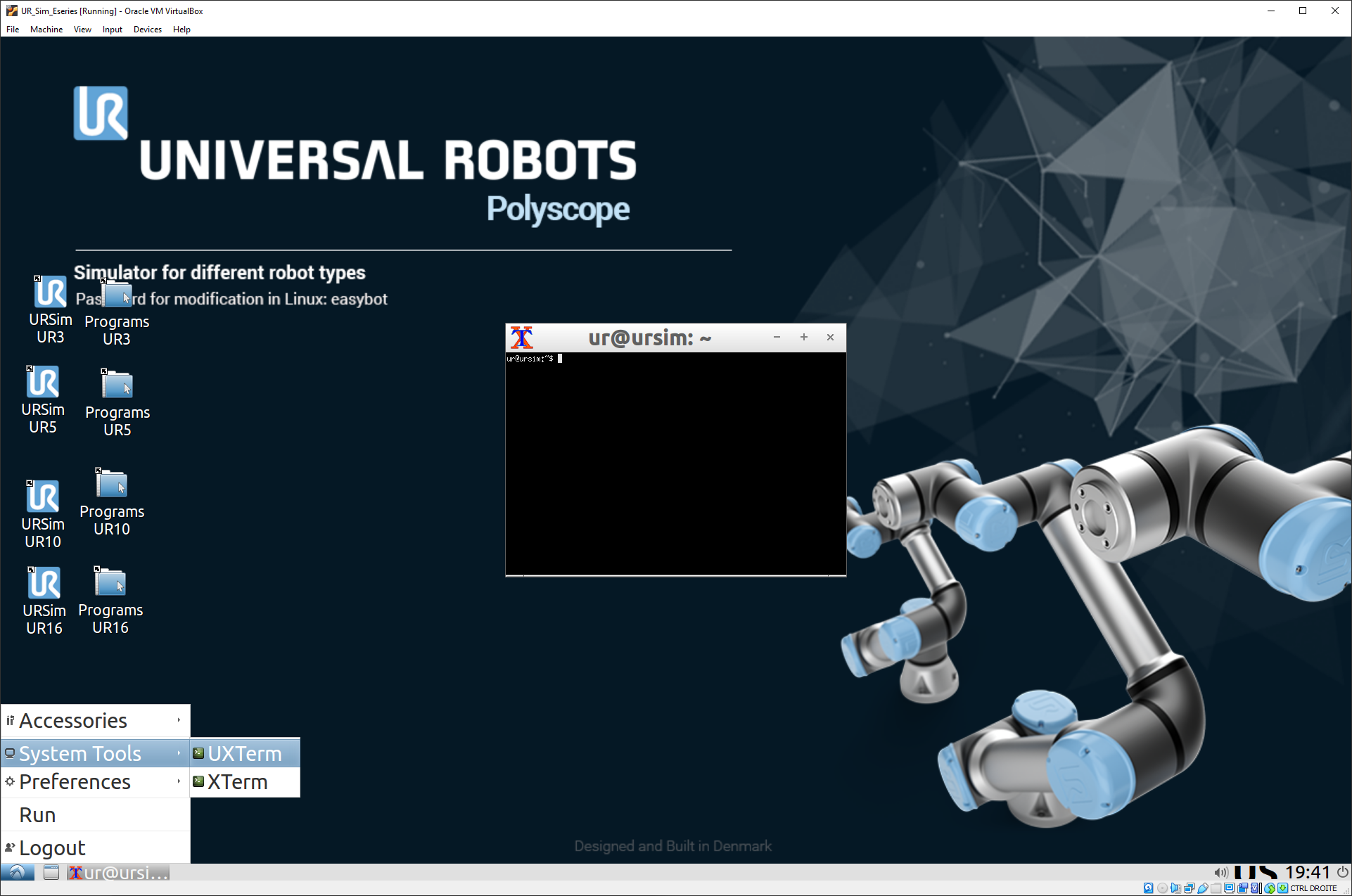
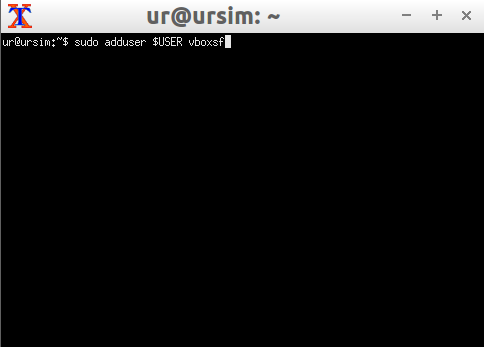
17.Abra o terminal: Selecione o botão Iniciar➔ System Ferramentas➔ UXTerm.
18.Digite no terminal: sudo adduser $USER vboxsf e pressione "Enter".
19.Reiniciar a VM.
20.Se Você gerar novos arquivos com o RoboDK na pasta compartilhada do Windows, poderá pressionar "Exibir" → "Atualizar Pasta" ou pressionar "F5" na pasta compartilhada da VM "RoboDK_Shared".
Use o driver RoboDK com o UR Sim
Você pode testar a conexão entre o RoboDK e o controlador da Universal Robots usando o URSim.
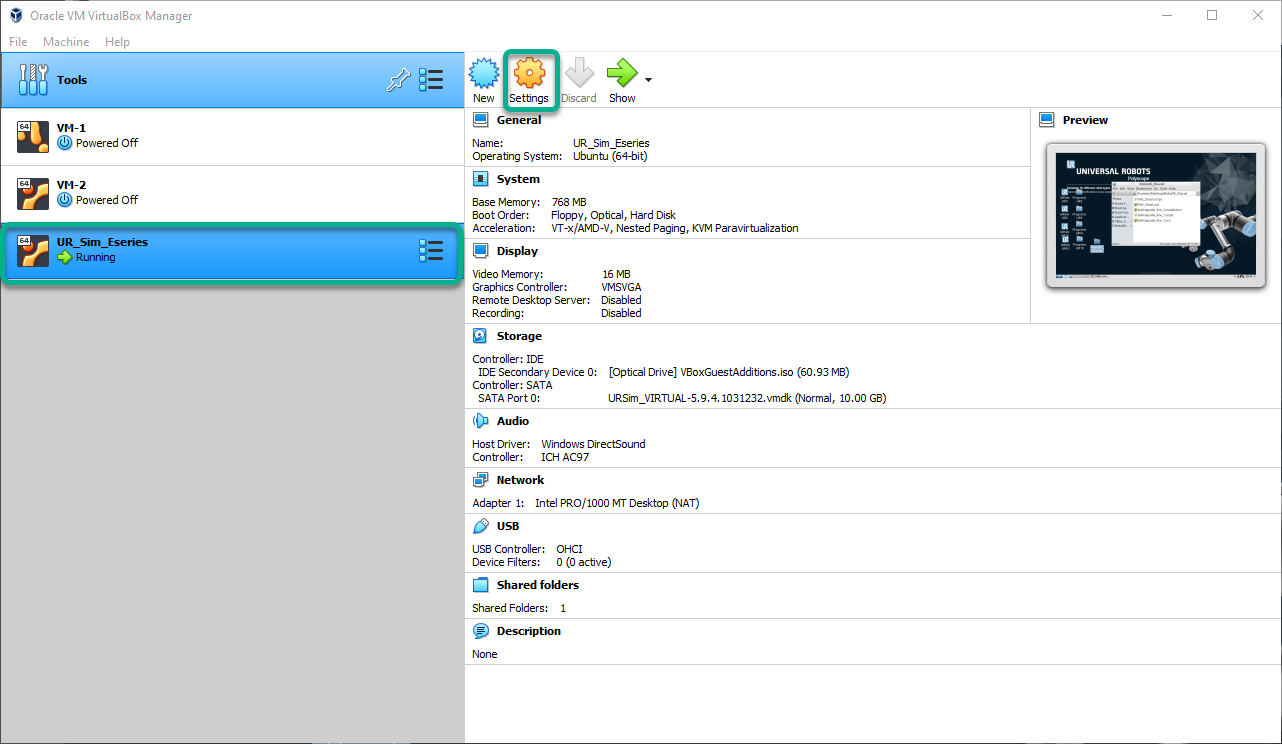
1.No Oracle VM VirtualBox Manager.
2.Selecione a VM UR_Sim_Eseries e pressione Settings.
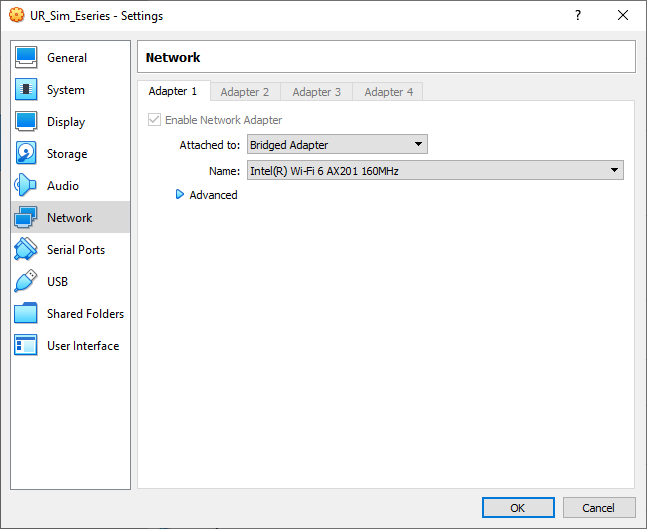
3.Selecione Rede➔ Conectado a: e selecione Placa em Modo Bridge e pressione OK.
4.Inicie a máquina virtual URSim.
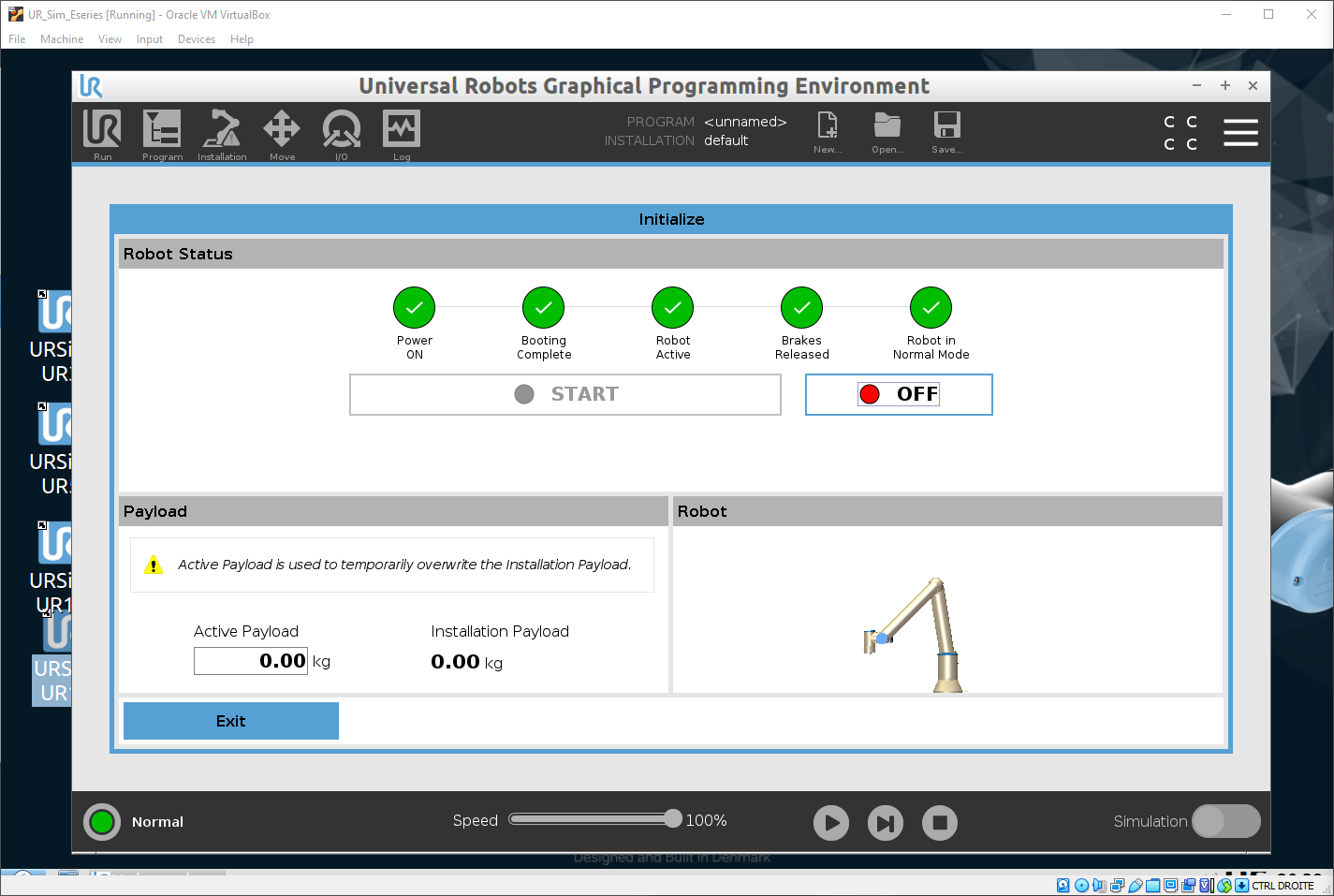
5.Inicie o Polyscope com seu modelo de UR preferido.
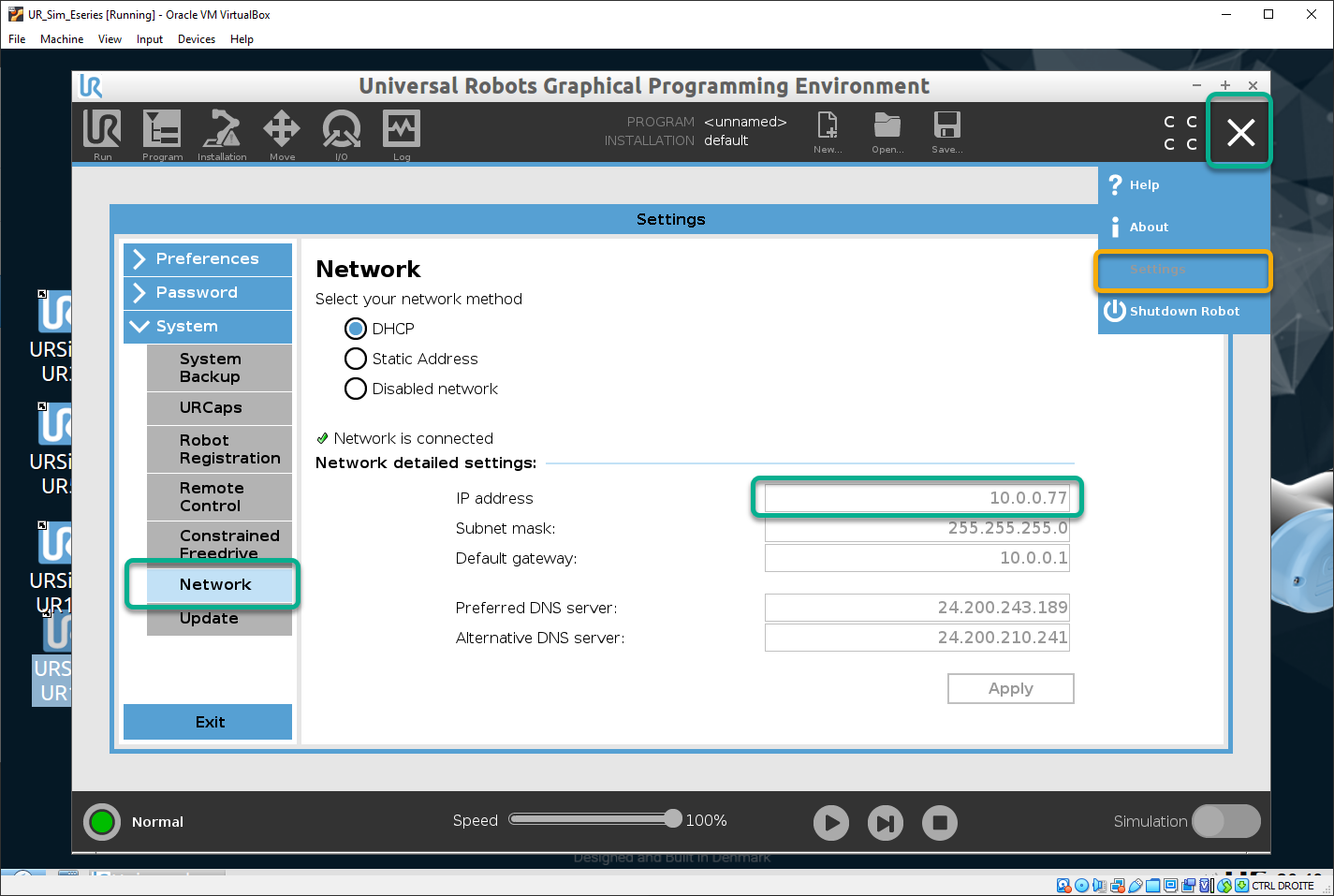
8.Recuperar o endereço IP do simulador.
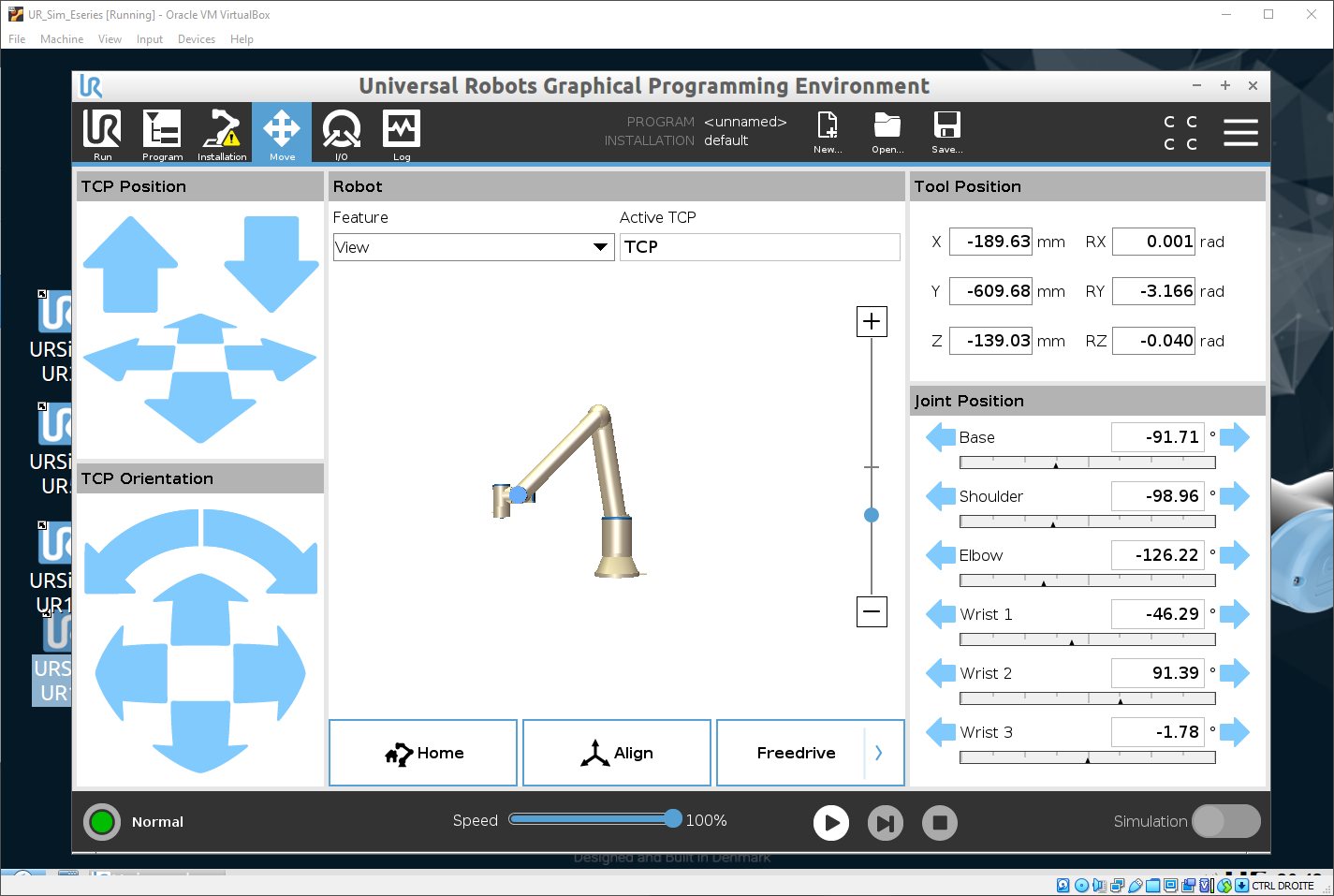
9.Vá para a janela "Move" (Mover) do URSim.
10.Abra a estação RoboDK com o mesmo modelo UR.
11.Selecione Conectar ➔ Conectar ao Robô.
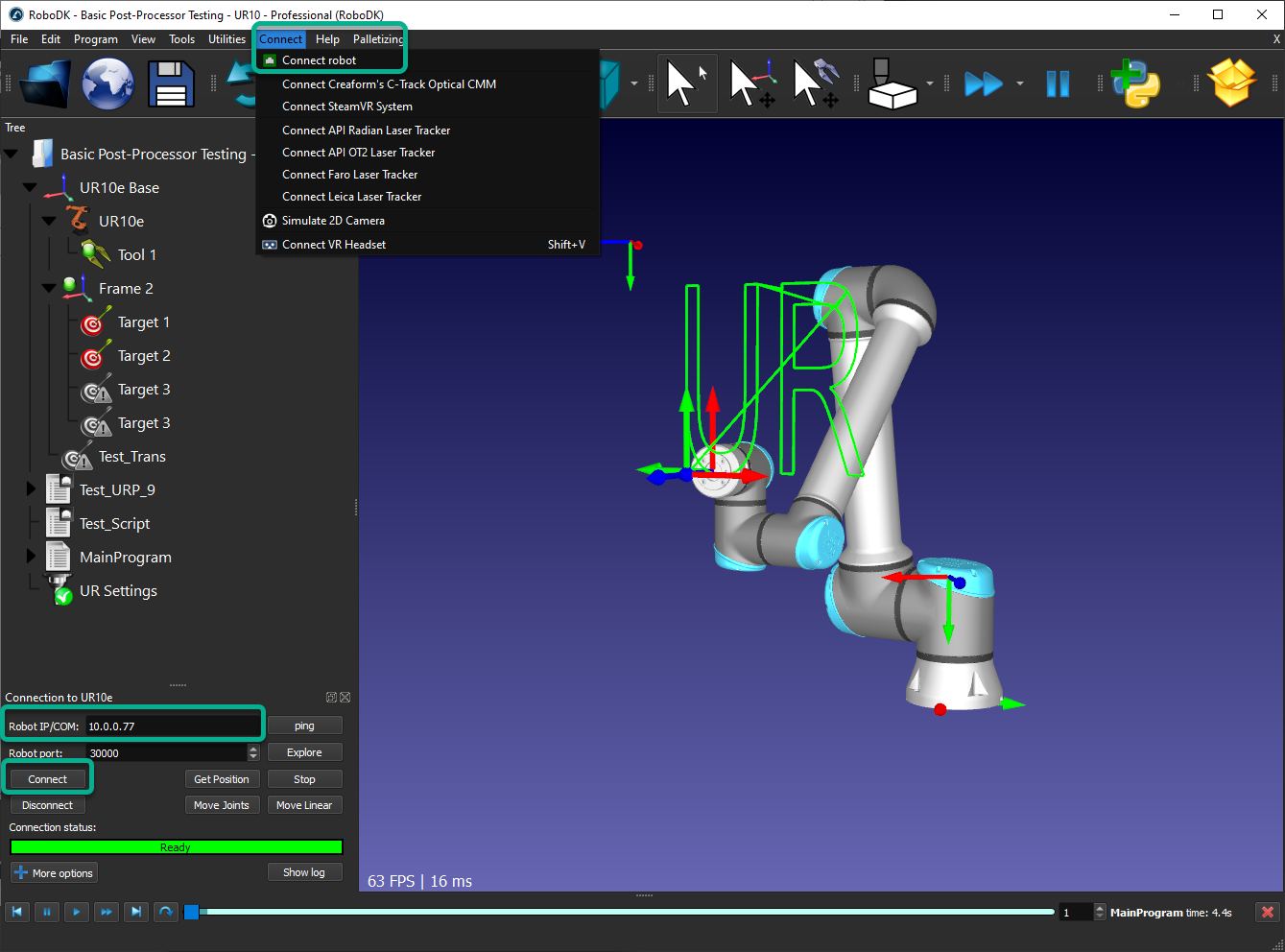
12.Digite o endereço IP do UR Sim e pressione Conectar.
13.Use o Obter Posição para recuperar a posição do robô URSim e aplicá-la ao RoboDK.
14.Use o Mover Eixos para mover o robô do URSim para a posição do robô do RoboDK.
15.Clique com o botão direito do mouse em um programa do RoboDK, selecione "Executar no robô" e "Executar" para executar o programa simultaneamente no RoboDK e no URSim.