Usando a garra RobotiQ do RoboDK
Você pode operar a garra RobotiQ diretamente do controlador UR, gerando programas off-line usando o RoboDK.
Para adicionar suporte às garras RobotiQ, você deve selecionar o pós-processador Universal_Robots_RobotiQ:
1.Clique com o botão direito do mouse em um programa ou em seu robô
2.Clique em Selecionar Pós-processador
3.Selecione Universal Robots RobotiQ
Dica: A alteração do pós-processador vinculado a um programa se aplica a todos os programas que usam o mesmo robô.
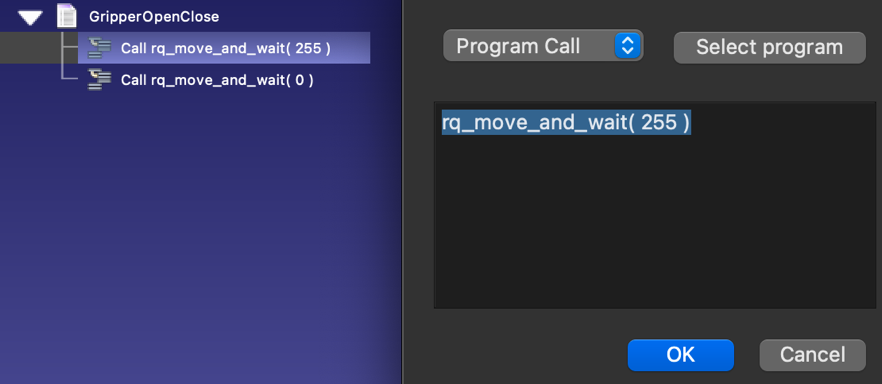
Você pode então gerar chamadas de programa que podem operar a garra do RobotiQ. Por exemplo: rq_move_and_wait( 255 ) para abrir a garra ou rq_move_and_wait( 0 ) para fechar a garra.
Depois de ter o programa pronto no RoboDK, você pode executá-lo no robô usando um destes dois métodos:
- Clique com o botão direito do mouse em um programa (como o GripperOpenClose) e selecione Enviar programa para o robô)
- Clique com o botão direito do mouse em um programa (como o GripperOpenClose) e selecione Gerar Programa (essa segunda opção requer que você carregue manualmente o programa no robô).
Esse método de operação não requer o uso do driver.
Dica: Saiba mais sobre como gerar programas na seção de programas.