Usando a garra RobotiQ
O RoboDK suporta a geração de programas para Universal Robots que podem operar as garras do RobotiQ. Você pode operar a garra RobotiQ gerando um programa off-line e usando o driver do RoboDK para robôs UR.
Usando a garra RobotiQ do RoboDK
Você pode operar a garra RobotiQ diretamente do controlador UR, gerando programas off-line usando o RoboDK.
Para adicionar suporte às garras RobotiQ, você deve selecionar o pós-processador Universal_Robots_RobotiQ:
1.Clique com o botão direito do mouse em um programa ou em seu robô
2.Clique em Selecionar Pós-processador
3.Selecione Universal Robots RobotiQ
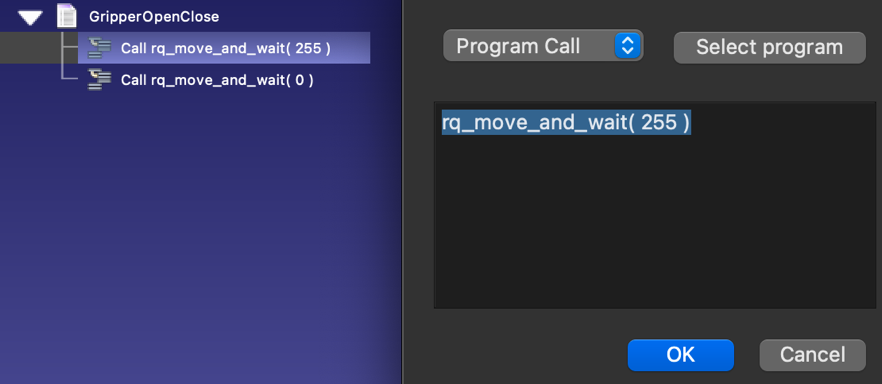
Você pode então gerar chamadas de programa que podem operar a garra do RobotiQ. Por exemplo: rq_move_and_wait( 255 ) para abrir a garra ou rq_move_and_wait( 0 ) para fechar a garra.
Depois de ter o programa pronto no RoboDK, você pode executá-lo no robô usando um destes dois métodos:
- Clique com o botão direito do mouse em um programa (como o GripperOpenClose) e selecione Enviar programa para o robô)
- Clique com o botão direito do mouse em um programa (como o GripperOpenClose) e selecione Gerar Programa (essa segunda opção requer que você carregue manualmente o programa no robô).
Esse método de operação não requer o uso do driver.
Usando a garra RobotiQ com o driver
Você pode operar a garra RobotiQ diretamente do RoboDK usando o driver (opção Executar no Robô). O driver do RoboDK para UR e RobotiQ permite que você execute programas passo a passo a partir do RoboDK e veja o ponteiro sendo executado a qualquer momento a partir do RoboDK.
É importante garantir que você possa se conectar ao robô para usar esse recurso. Talvez seja necessário ter privilégios de administrador no Windows e/ou adicionar uma regra do Firewall do Windows para permitir essa comunicação (se você desativar o Firewall do Windows, isso poderá ajudar a solucionar o problema se ele estiver relacionado ao Firewall).
Você deve seguir estas etapas para adicionar suporte à movimentação da garra RobotiQ diretamente do RoboDK:
1.Faça o download do arquivo de script a seguir:
https://robodk.com/files/upload/progrobodk-rq.zip
https://robodk.com/files/upload/progrobodk-rq-no-tool-com.zip.
2.Descompacte o arquivo progrobodk.script aqui:
C:/RoboDK/bin/progrobodk.script
3.Certifique-se de reiniciar o driver se ele estiver em execução (clique duas vezes em Desconectar e, em seguida, em Conectar).
4.Selecione Ferramentas-Opções-Drivers
5.Desmarque a opção: Gerenciar chamadas de programa com o RoboDK quando conectado a um robô.
Para operar corretamente a garra usando o driver (por exemplo, abrir/fechar a garra), você deve usar a chamada de programa para rq_move_and_wait passando um parâmetro no intervalo de 0 a 255.
Exemplo:
rq_move_and_wait( 0 ) # Fecha totalmente a garra
rq_move_and_wait( 255 ) # Abrir totalmente a garra
O número passado como argumento é exigido pelo driver.