Use o driver RoboDK com o UR Sim
Você pode testar a conexão entre o RoboDK e o controlador da Universal Robots usando o URSim.
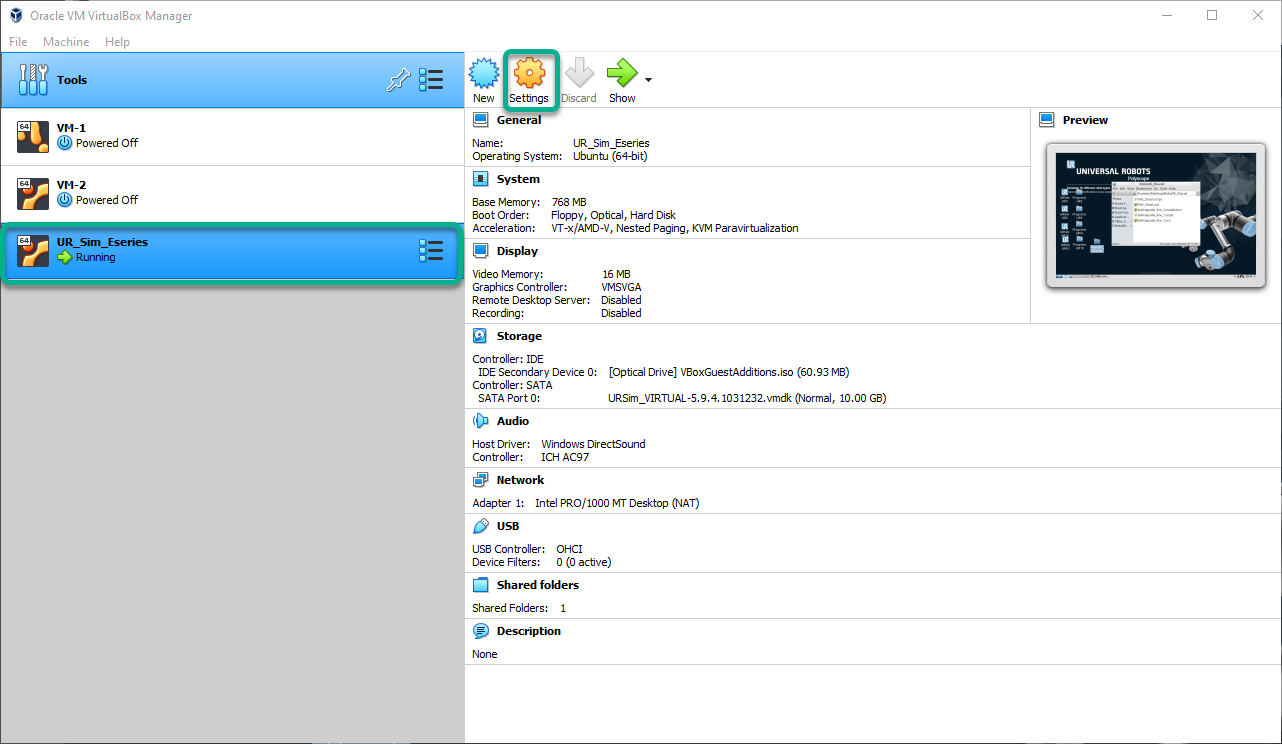
1.No Oracle VM VirtualBox Manager.
2.Selecione a VM UR_Sim_Eseries e pressione Settings.
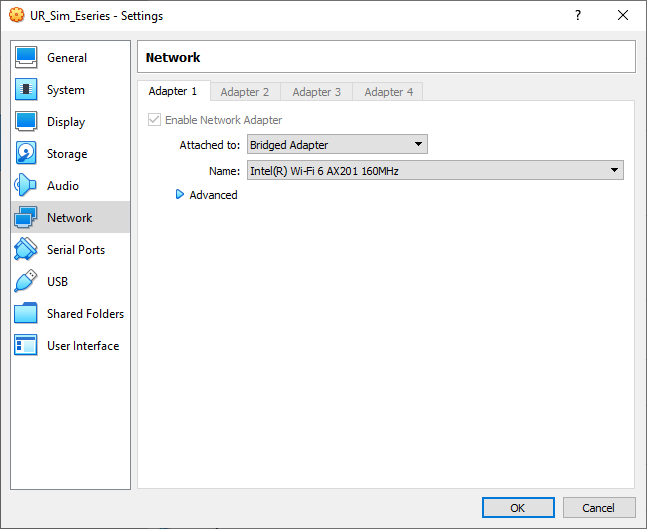
3.Selecione Rede➔ Conectado a: e selecione Placa em Modo Bridge e pressione OK.
4.Inicie a máquina virtual URSim.
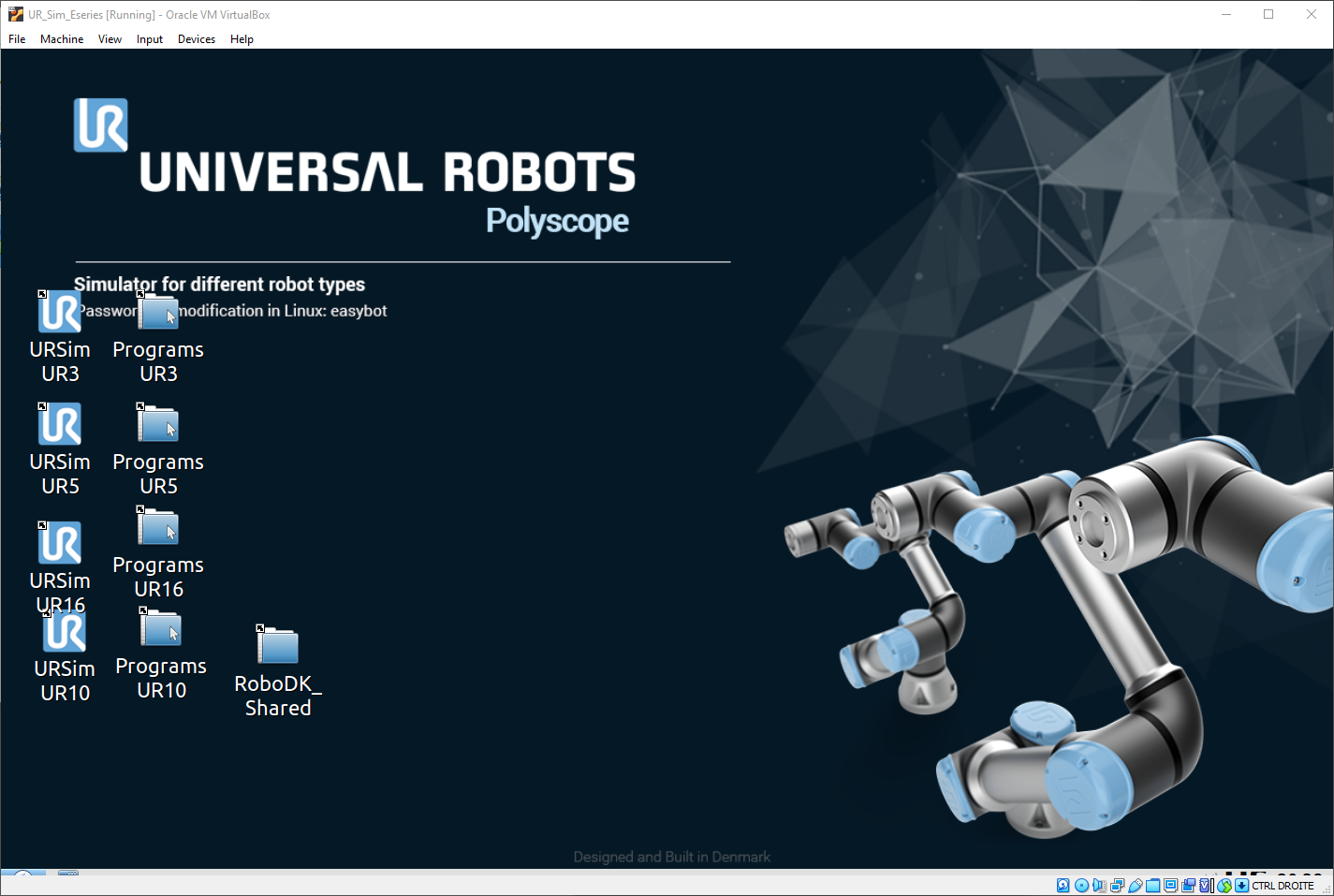
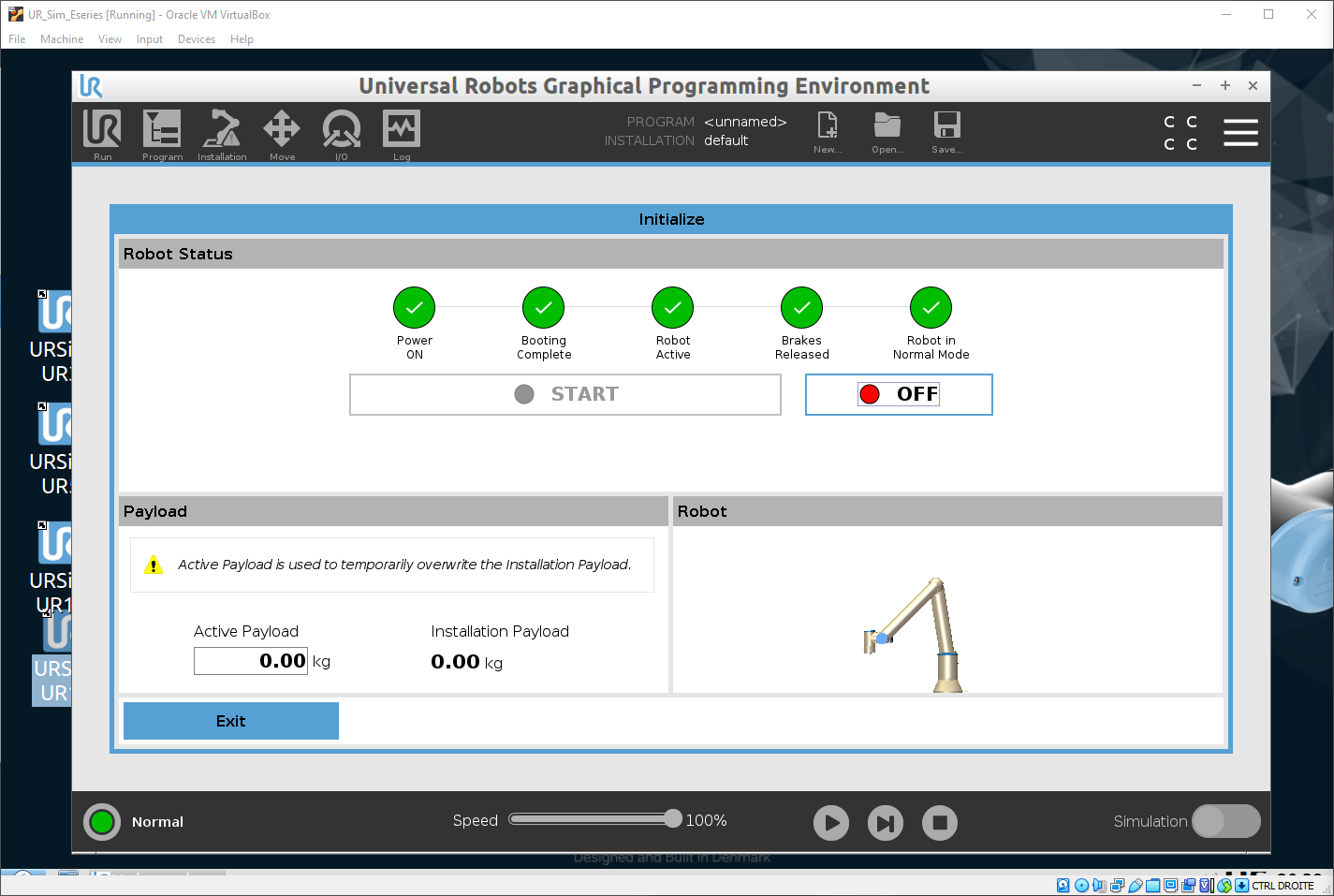
5.Inicie o Polyscope com seu modelo de UR preferido.
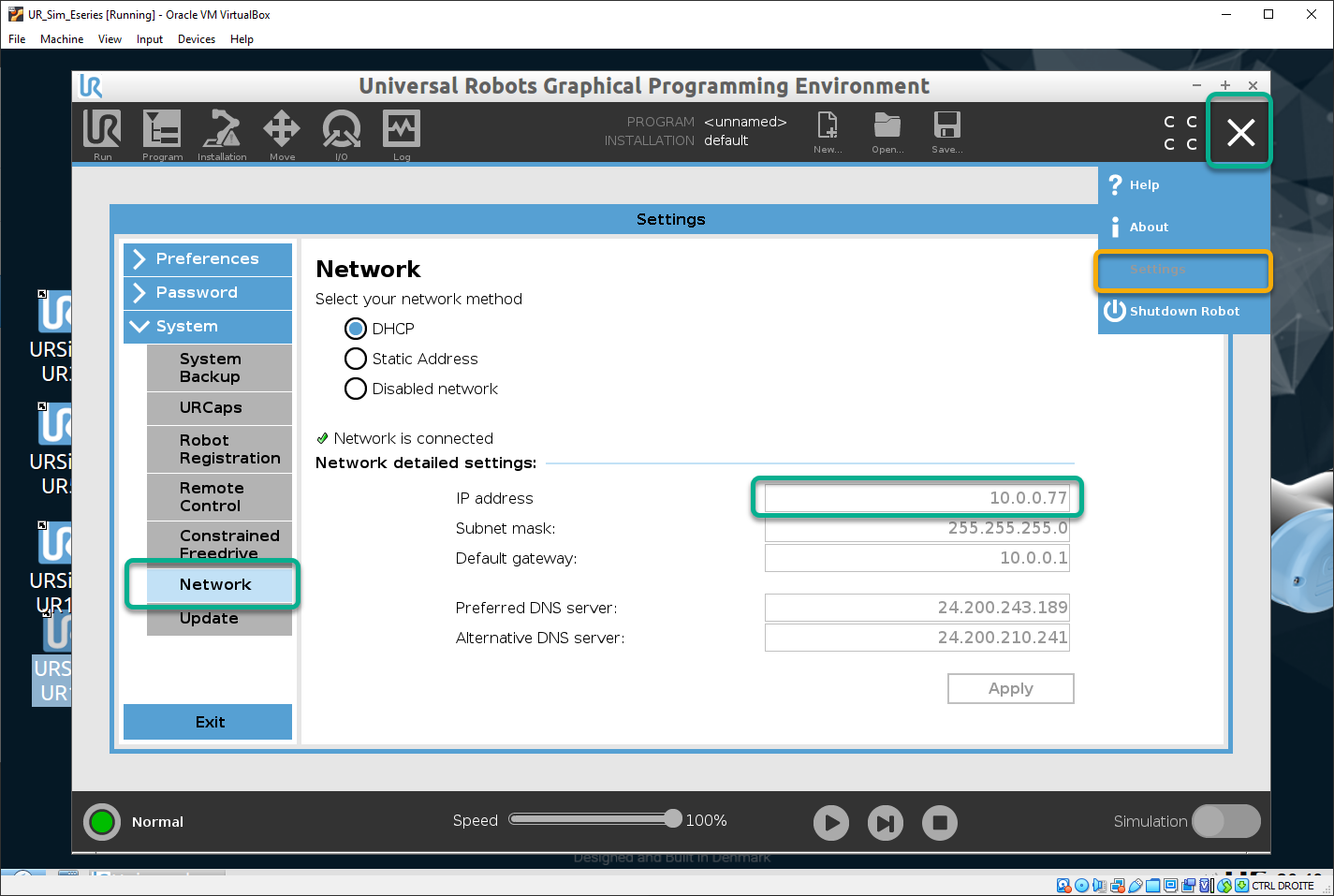
8.Recuperar o endereço IP do simulador.
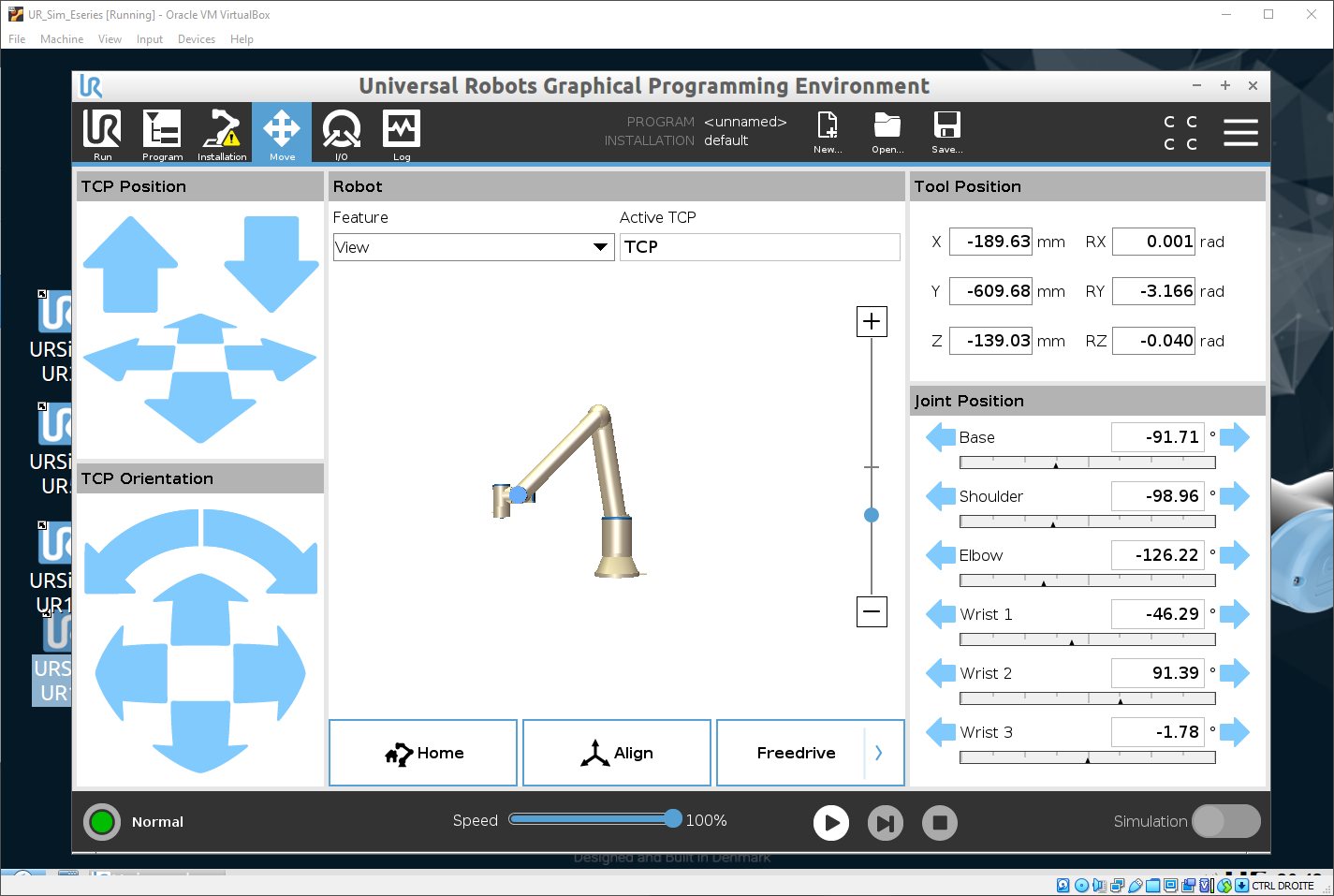
9.Vá para a janela "Move" (Mover) do URSim.
10.Abra a estação RoboDK com o mesmo modelo UR.
11.Selecione Conectar ➔ Conectar ao Robô.
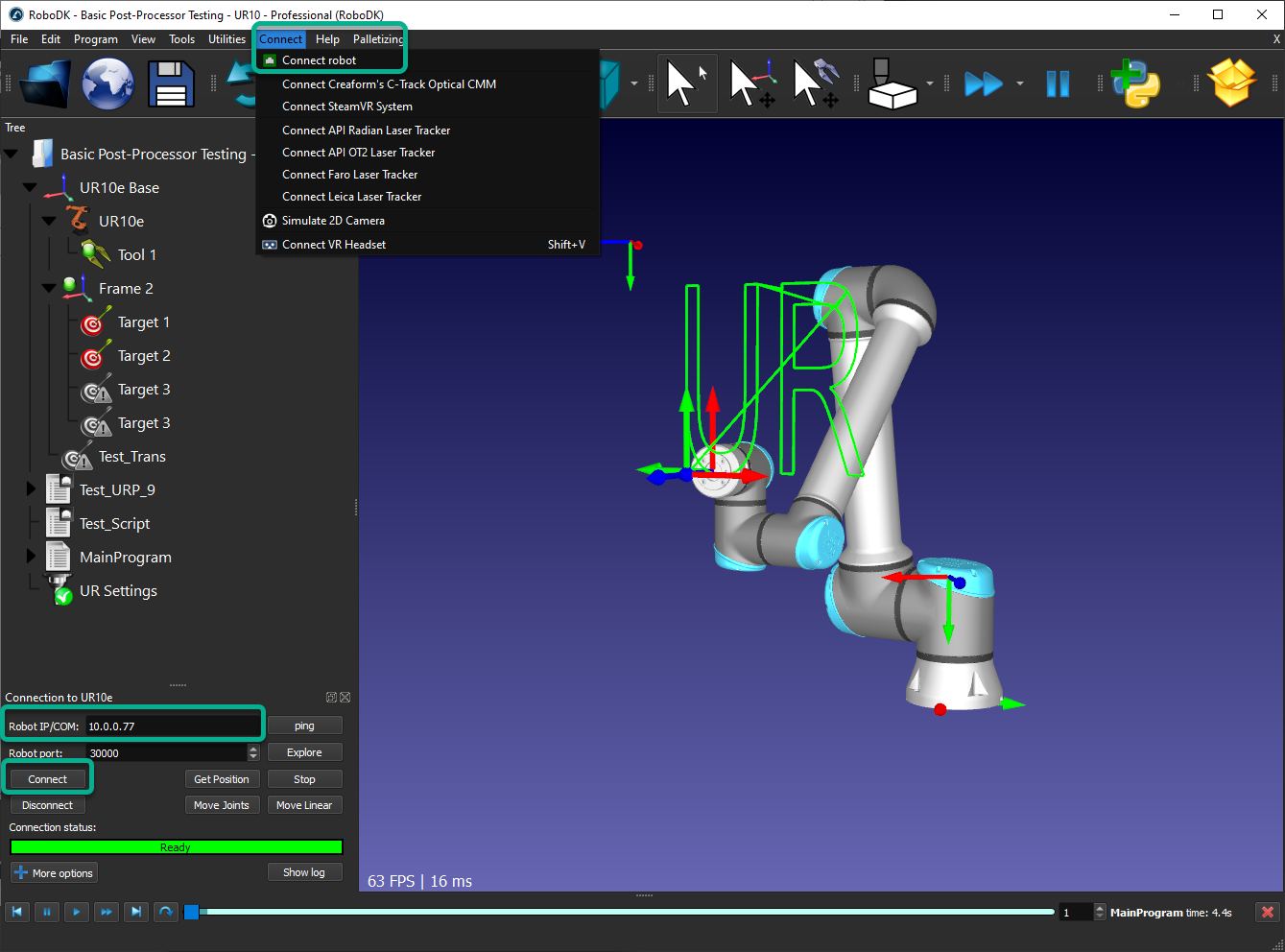
12.Digite o endereço IP do UR Sim e pressione Conectar.
13.Use o Obter Posição para recuperar a posição do robô URSim e aplicá-la ao RoboDK.
14.Use o Mover Eixos para mover o robô do URSim para a posição do robô do RoboDK.
15.Clique com o botão direito do mouse em um programa do RoboDK, selecione "Executar no robô" e "Executar" para executar o programa simultaneamente no RoboDK e no URSim.