Calibração do sistema
Esta seção lhe orientará a calibrar o robô e a sonda. Essa etapa só precisa ser realizada uma vez, mas é importante para obter bons resultados de precisão.
Antes de iniciar a calibração, é recomendável carregar os modelos 3D de sua célula. Isso ajudará você a evitar automaticamente as colisões durante o processo de calibração. Se não tiver os modelos 3D de cada componente, você pode simplesmente carregar caixas planas e esferas para representar as áreas que não deseja acessar.
Calibração do robô
Esta seção descreve como calibrar automaticamente o robô usando o RoboDK TwinTrack e o sistema de medição. A calibração do robô permite melhorar a precisão do robô em até 0,150 mm quando você gera programas off-line ou usando as ferramentas de demonstração de ensino do TwinTrack no RoboDK (o nível de precisão depende muito da qualidade e do tamanho do robô).
Recomenda-se realizar a calibração do robô depois que você construir a célula robótica ou fizer grandes modificações (como alterar a carga útil da ferramenta). Isso ajuda a obter a melhor precisão.
Antes de iniciar a calibração, você pode modelar a célula no RoboDK para evitar colisões automaticamente. Você pode usar geometrias básicas, como planos ou cubos, para evitar áreas indesejadas. Você também pode limitar o espaço da articulação do robô.
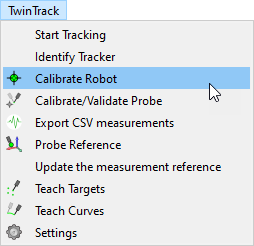
Você pode selecionar TwinTrack ➔ Calibrar robô para iniciar o procedimento de calibração do robô.
Essa operação guiará você para calibrar o robô, incluindo a geração automática de pontos para calibração e validação. O RoboDK pode gerar automaticamente pontos que são visíveis pelo tracker.
O procedimento de calibração do robô requer a realização de cerca de 200 medições. O procedimento começa com a realização de algumas medições em torno da posição inicial do robô
Quando a configuração estiver pronta e a comunicação com o robô estiver devidamente estabelecida, o procedimento de calibração deverá levar de 15 a 30 minutos.
O sistema não requer dispositivos ou acessórios especiais, ele simplesmente rastreia a posição da ferramenta em relação à referência do tracker.
Não há problema se você perder algumas medições porque os pontos não estão visíveis.
Calibração da sonda
É importante calibrar adequadamente a ponta da sonda e garantir que ela esteja precisa dentro das tolerâncias desejadas.
A calibração da ponta da sonda é realizada movendo-se a ponta em torno de um ponto estático.
Selecione TwinTrack➔ Calibrar/Validar Ponta da Sonda para iniciar a calibração da ferramenta.
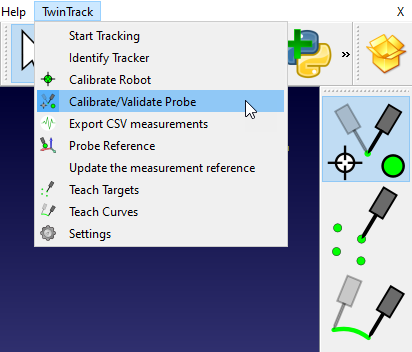
Nesse caso, como estamos usando o Creaform HandyProbe, você pode calibrar a sonda usando o software Creaform VXElements e validá-la usando o RoboDK.
Para validar a ponta da sua sonda, basta mover um ponto estático e o RoboDK exibirá a precisão.
Programação off-line
Você pode usar os recursos de programação por demonstração sem um robô real. Isso significa que você pode simular e programar seu robô off-line somente com seu sistema de medição antes de ter acesso ao robô real.
Você só precisa de uma peça com um sistema de coordenadas bem definido que possa ser usado como referência.
Depois de ter o sistema de medição e a peça prontos, você pode seguir estas etapas para definir o sistema de coordenadas do dispositivo de medição:
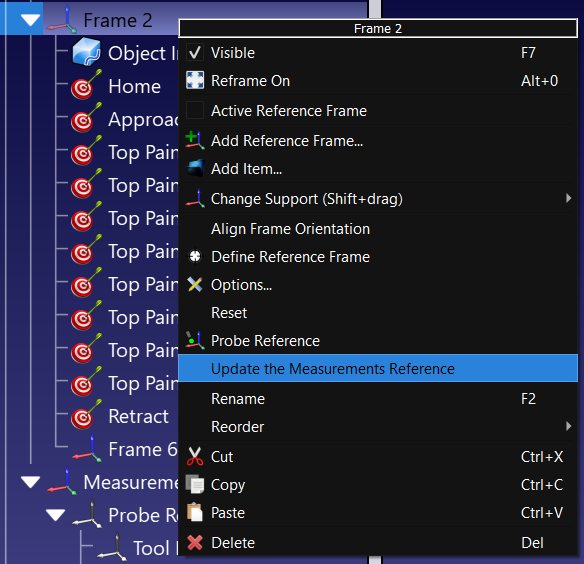
1.Clique com o botão direito do mouse no sistema de coordenadas de sua peça (ou no sistema de coordenadas do gabarito ao qual ela está anexada).
2.Selecione Atualizar a referência de medidas.
3.Siga as instruções na tela para ensinar 3 pontos que definem o sistema de coordenadas: a origem, um ponto em X+ e um ponto em Y+.
O sistema de medição será atualizado de acordo, e você poderá continuar a ensinar pontos, curvas ou outros sistemas de coordenadas.