Calibrar os parâmetros do robô
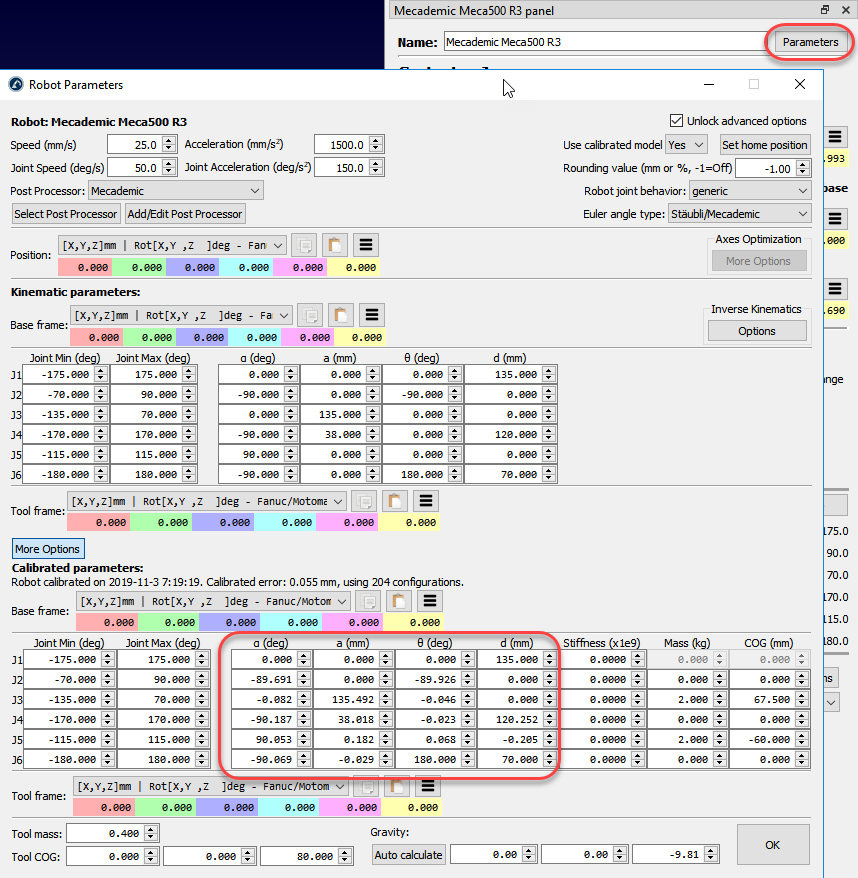
Você pode acessar os parâmetros calibrados no menu Parâmetros depois que um robô tiver sido calibrado. Alguns controladores de robôs permitem a modificação de determinados parâmetros do robô.
Observação: O RoboDK usa a convenção Denatit-Hartenberg Modified. Certifique-se de usar todos os parâmetros selecionados/calibrados.
Importante: Devemos nos certificar de que não geramos programas filtrados se atualizarmos os parâmetros do controlador do robô.