Configuração
Para usar o sistema TwinTrack, você precisa carregar seu robô no RoboDK e conectar-se ao robô e ao sistema de medição. Opcionalmente, podemos modelar a célula adicionando os modelos 3D de objetos e ferramentas. Isso ajudará a evitar colisões.
8.Carregue o robô:
a.Selecione Arquivo ➔ Arquivo Abrir biblioteca on-line. A biblioteca on-line será exibida no RoboDK.
b.Use os filtros para encontrar seu robô.
c.Selecione Download para carregar automaticamente o robô em sua estação RoboDK.
d.Como alternativa, faça o download do arquivo do robô diretamente da biblioteca on-line e abra o arquivo com o RoboDK (arquivo .robot).
9.Conecte o sistema de medição:
a.Conecte o sistema de medição ao seu computador.
b.Selecione Conectar e conecte-se ao seu sistema de medição. Certifique-se de que o software necessário também esteja instalado. Talvez seja necessário alterar o IP do tracker, dependendo do sistema de medição que você usa.
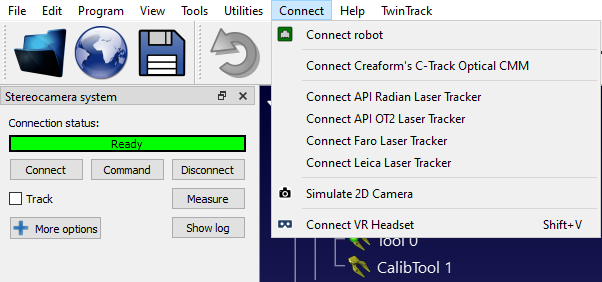
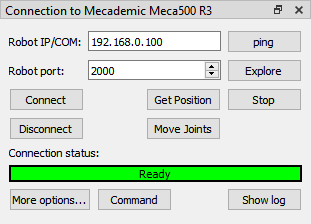
10.Conecte o robô:
a.Selecione Conectar➔ Conectar robô.
b.Digite o IP e a porta do robô.
c.Selecione Conectar.