Filtragem de programas
Uma vez que o robô tenha sido calibrado, precisamos nos certificar de que geramos programas filtrados ou que levamos em conta os parâmetros calibrados do robô para garantir que aproveitamos a calibração do robô.
Devemos seguir um e somente um dos métodos a seguir para programar os robôs com precisão após a calibração:
1.Use o RoboDK para programação off-line para gerar programas precisos (os programas gerados já estão filtrados). Essa é a opção de programação off-line recomendada para obter os melhores resultados de precisão.
2.Calibrar os parâmetros do controlador do robô (como comprimentos de link, parâmetros DH-DHM e/ou parâmetros de masterização).
Programação off-line precisa
Quando um robô é calibrado com o RoboDK, temos a opção de ativar a cinemática precisa clicando com o botão direito do mouse no robô e selecionando Usar cinemática precisa.
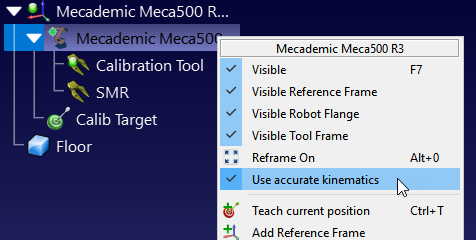
Se a precisão estiver ativa, veremos um ponto verde; se não estiver ativa, veremos um ponto vermelho.
Essa é a opção recomendada para obter resultados de precisão ideais. Com a opção de precisão do robô ativada no RoboDK, todos os programas gerados pelo RoboDK serão automaticamente filtrados. Isso significa que todas as coordenadas cartesianas serão ligeiramente modificadas para compensar os erros do robô.
Essa é a opção mais adequada se você estiver planejando usar seus robôs para usinagem de robôs, programar robôs a partir de arquivos NC ou usar qualquer um dos plugins CAD/CAM suportados pelo RoboDK.
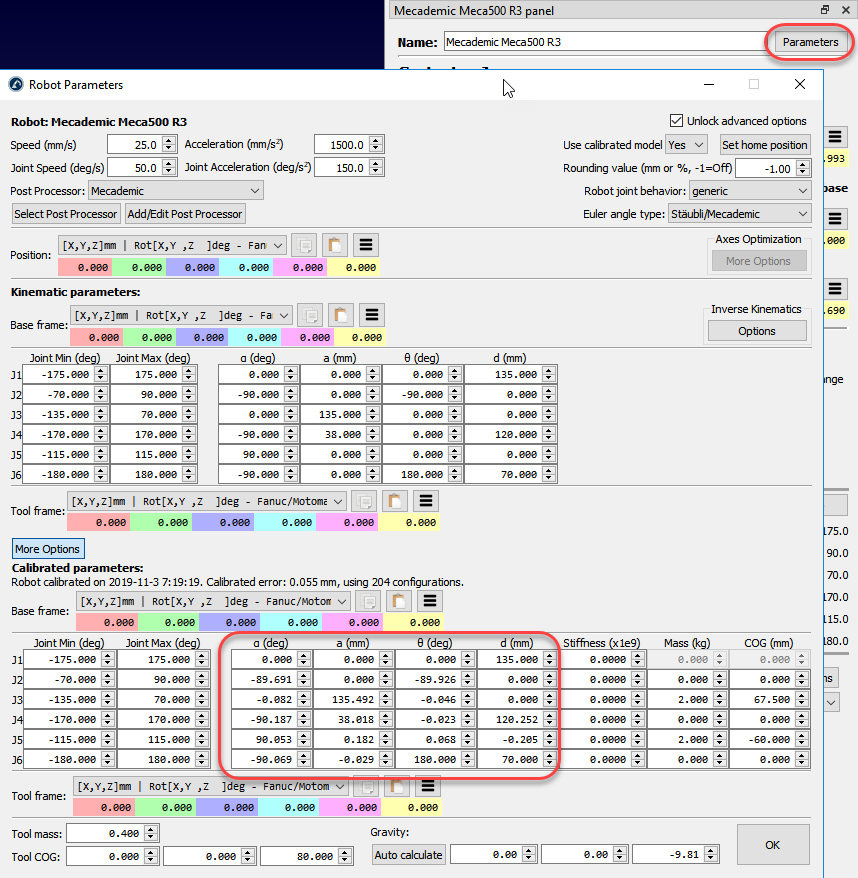
Calibrar os parâmetros do robô
Você pode acessar os parâmetros calibrados no menu Parâmetros depois que um robô tiver sido calibrado. Alguns controladores de robôs permitem a modificação de determinados parâmetros do robô.