Frame de referência e frame de ferramentas
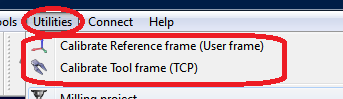
O RoboDK fornece alguns utilitários para calibrar frames de referência e frames de ferramentas. Essas ferramentas podem ser acessadas em Utilitários ➔ Calibrar Frame de Refer6encia e Utilitários ➔ Calibrar Frame de Ferramenta, respectivamente.
Para calibrar um frame de referência ou uma ferramenta que não tenha sido calibrada automaticamente (também conhecido como frame do usuário e TCP, respectivamente), precisamos de algumas configurações do robô que toquem 3 ou mais pontos, essas configurações do robô podem ser valores de eixos ou coordenadas cartesianas (com dados de orientação em alguns casos). Recomenda-se usar os valores dos eixos em vez das coordenadas cartesianas, pois é mais fácil verificar a configuração real do robô no RoboDK (copiando e colando os valores de eixos do robô na tela principal do RoboDK).
Calibração da ferramenta
Selecione Utilitários ➔ Calibrar ferramenta para calibrar o TCP usando o RoboDK. Podemos usar quantos pontos desejarmos, usando diferentes orientações. Mais pontos e mudanças de orientação maiores são melhores, pois obteremos uma estimativa melhor do TCP, bem como uma boa estimativa do erro do TCP.
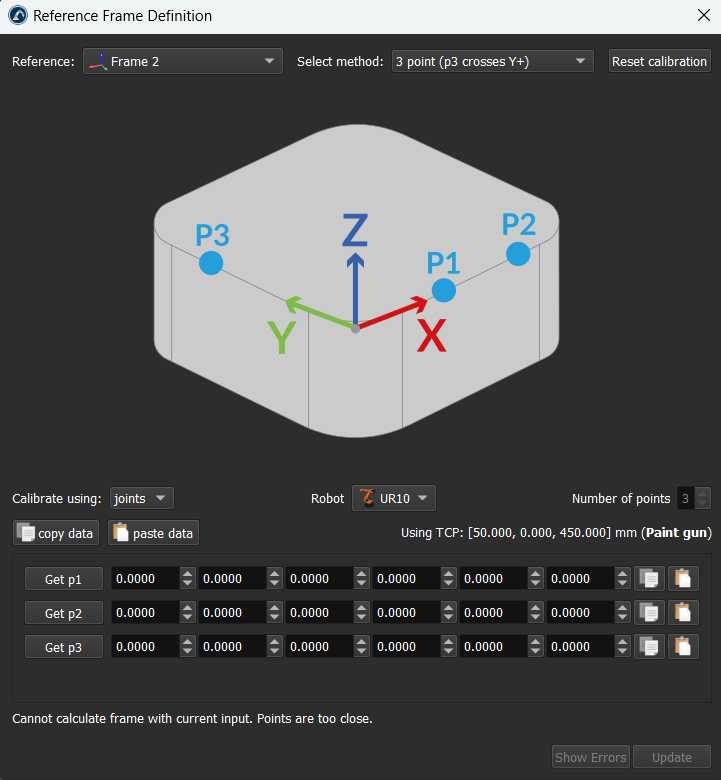
Calibração do frame de referência
Selecione Utilitários ➔ Calibrar referência para calibrar um frame de referência. É possível definir um frame de referência usando diferentes métodos. No exemplo da figura, um frame de referência é definido por três pontos: os pontos 1 e 2 definem a direção do eixo X e o ponto 3 define o eixo Y positivo.