RoboDK TwinTrack
O RoboDK TwinTrack permite que você imite e reproduza facilmente os movimentos humanos com um robô para uma automação rápida e confiável. Você pode ensinar manualmente ao seu robô a trajetória a ser seguida, da mesma forma que executaria manualmente uma operação de fabricação com as mãos, pode rastreá-lo e reproduzi-lo com um robô.
Introdução
O RoboDK TwinTrack oferece uma nova maneira de ensinar robôs por meio de demonstração e pode ser usado para muitas aplicações de fabricação, como pintura, polimento, rebarbação, distribuição, soldagem etc.
Uma vantagem de usar um método de programação por demonstração, como o TwinTrack, é que você pode imitar a operação de fabricação com o seu robô e ele reproduzirá o mesmo movimento. Esse método de programação de robôs não exige que você use modelos 3D. Ele também não exige que o operador use um computador. Com isso, você economizará uma quantidade significativa de tempo e poderá começar a programar robôs mais rapidamente.

O RoboDK TwinTrack requer um sistema de medição 6D e uma sonda portátil ou uma ferramenta de fabricação portátil que permita a você imitar a operação de fabricação com as mãos.
O RoboDK é compatível com mais de 1000 robôs de 90 fabricantes de robôs diferentes. Isso significa que você pode programar qualquer braço de robô suportado pelo RoboDK. Você também pode criar seus próprios robôs e mecanismos.
Com as ferramentas de calibração TwinTrack e RoboDK, você pode criar programas de robôs altamente precisos. Com um bom sistema de medição, você pode alcançar uma precisão de posição de até 0,150 mm. O nível de precisão depende muito da qualidade e do tamanho do robô. Ao usar as ferramentas de calibração do RoboDK, você pode criar seu gêmeo digital com precisão.
Requisitos
É necessário instalar o Add-in RoboDK TwinTrack e ter um sistema de medição compatível para usar as ferramentas TwinTrack.
Certifique-se de ter os seguintes itens:
1.Um ou mais braços de robôs industriais.
2.Um sistema de medição compatível (6 DOF). Os sistemas de medição compatíveis incluem:
a.Trackers do HTC Vive (SteamVR)
b.Kit completo de realidade virtual (SteamVR)
c.Laser tracker com capacidade de 6 DOF e driver RoboDK compatível
d.Creaform C-Track
e.Sistema de câmera OptiTrack (recomenda-se o uso de 4 PrimeX13 para melhor precisão)
1.O software RoboDK deve ser instalado e uma licença apropriada para o TwinTrack deve ser instalada.
2.Você precisa de drivers de robô compatíveis para o controlador do robô se quiser executar automaticamente os programas do robô.
3.Instale o Add-in TwinTrack RoboDK:
a.Faça o download do Add-in TwinTrack (arquivo .rdkp).
b.Clique duas vezes no arquivo para instalar o Add-in e abri-lo no RoboDK.
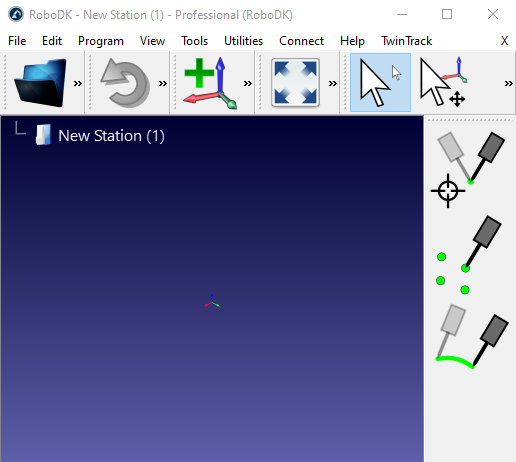
c.Se não vir o menu TwinTrack: selecione Ferramentas ➔ Geranciador de Add-ins e clique duas vezes no TwinTrack para ver o menu TwinTrack no canto superior direito.
Configuração com os trackers SteamVR e HTC Vive
Esta seção o orienta nas etapas de configuração do SteamVR. Você pode usar uma ferramenta personalizada com um tracker para imitar suas operações de fabricação com a mão para que o robô possa reproduzir o mesmo movimento.
O RoboDK TwinTrack é compatível com sistemas de realidade virtual e todos os trackers compatíveis com o SteamVR, incluindo os trackers HTC Vive da v1 à v3.
Siga estas etapas para configurar seu sistema SteamVR para o TwinTrack:
1.Instale o Steam, caso ainda não o tenha feito, talvez seja necessário criar uma conta no Steam.
2.Adicione o SteamVR, uma extensão do Steam que adiciona suporte à realidade virtual e ao rastreamento 6D.
3.Elimine a necessidade de ter um headset de realidade virtual se você não o tiver ou não precisar dele seguindo estas etapas:
a.Edite o arquivo a seguir usando um editor de texto:
C:/Arquivos de Programas (x86)/Steam/steamapps/common/SteamVR/drivers/null/resources/settings/
default.vrsettings
E defina:
"enable": true, (o padrão é false)
b.Edite o arquivo a seguir usando um editor de texto:
C:/Program Files (x86)/Steam/steamapps/common/SteamVR/resources/settings/
default.vrsettings
E defina:
"requireHmd": false, (o padrão é true)
"forcedDriver": "null", (o padrão é vazio "")
"activateMultipleDrivers": true, (o padrão é false)
Feche o SteamVR e abra-o novamente.
4.Abra o SteamVR e siga as instruções para configurar seu sistema. Você pode aceitar todas as configurações padrão se não estiver usando um headset de RV.
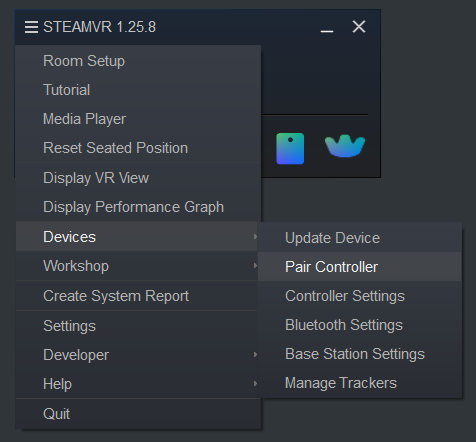
5.Emparelhe um tracker como uma sonda:
a.Mantenha o botão liga/desliga do tracker pressionado por 2 segundos para ligá-lo (a luz do tracker deve ficar azul para um tracker não pareado)
b.Abra o menu➔ Devices (Dispositivos)➔ Pair Controller (Controlador de par)
c.Selecione a opção: HTC ViveTracker. O tracker deve ser emparelhado automaticamente, e a luz do tracker deve ficar verde.
Para remover o link, você pode manter pressionado o botão liga/desliga por 2 segundos e a luz deverá ficar azul (pode piscar).
6.Definir a função de tracker como Held in hand.
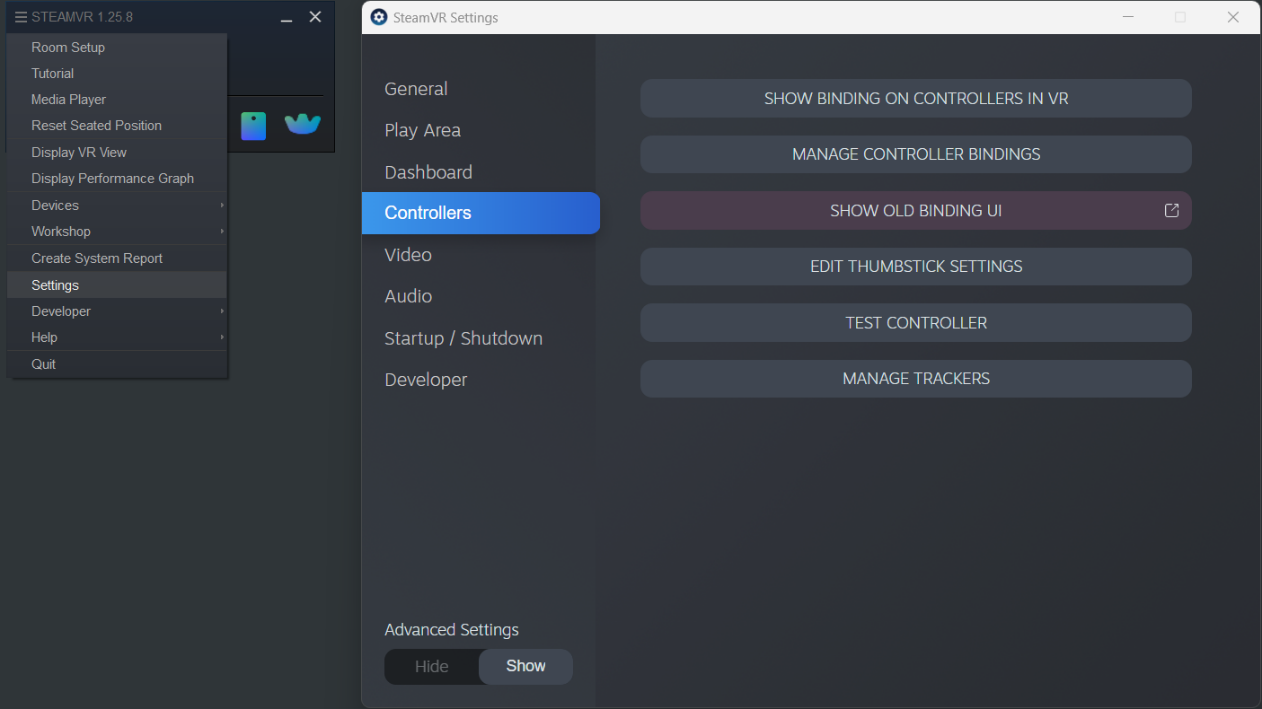
a.Selecione o menu do SteamVR➔ Settings
b.Selecionar controladores
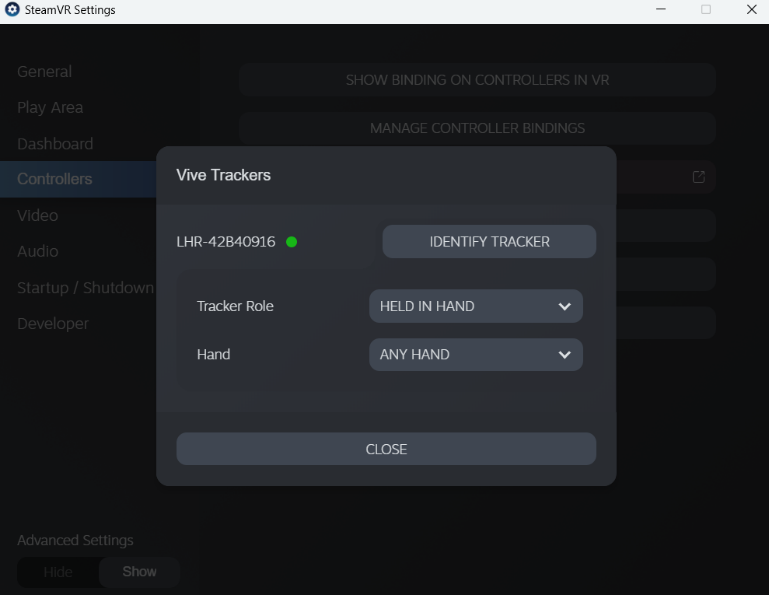
c.Selecione Manage Trackers (Gerenciar trackers)
d.Set Tracker Role➔ Segurado na mão
e.Definir como Any hand (padrão)
7.Personalize os vínculos do controle:
a.Selecione SteamVR➔ Settings
b.Definir configurações avançadas➔ Show
c.Selecionar controladores
d.Selecione Show Old Bindings UI
e.Selecione o RoboDK
f.Selecione o controle atual e defina-o como Vive Tracker in Hand (a menos que já esteja definido)
g.Selecione Edit no vínculo atual
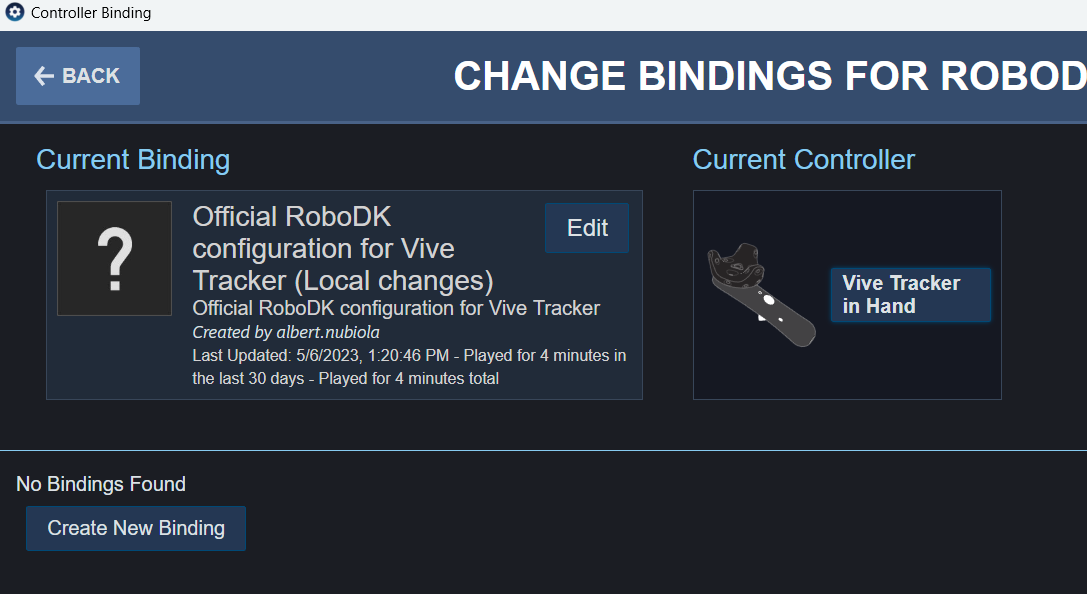
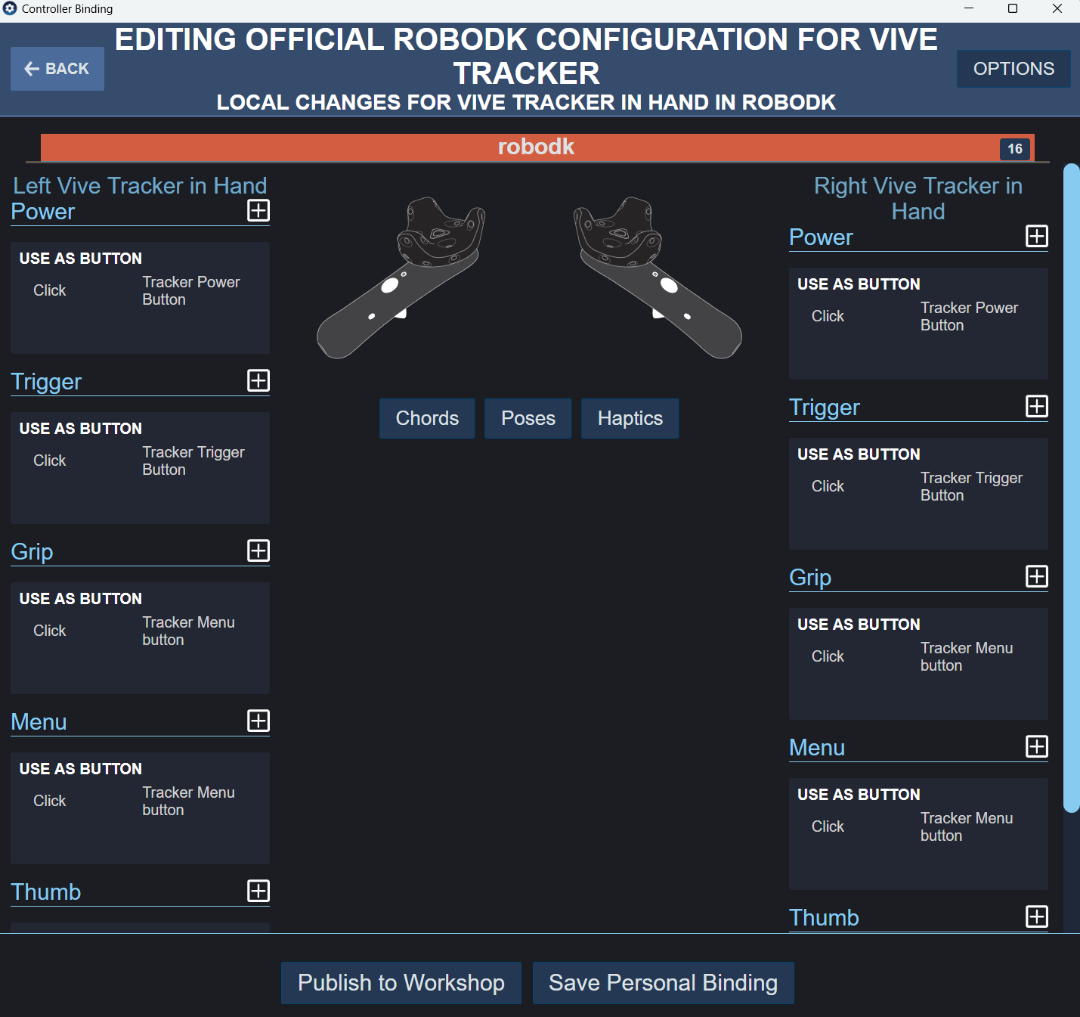
h.Você deverá ver as associações padrão para o tracker.
Configuração
Para usar o sistema TwinTrack, você precisa carregar seu robô no RoboDK e conectar-se ao robô e ao sistema de medição. Opcionalmente, podemos modelar a célula adicionando os modelos 3D de objetos e ferramentas. Isso ajudará a evitar colisões.
8.Carregue o robô:
a.Selecione Arquivo ➔ Arquivo Abrir biblioteca on-line. A biblioteca on-line será exibida no RoboDK.
b.Use os filtros para encontrar seu robô.
c.Selecione Download para carregar automaticamente o robô em sua estação RoboDK.
d.Como alternativa, faça o download do arquivo do robô diretamente da biblioteca on-line e abra o arquivo com o RoboDK (arquivo .robot).
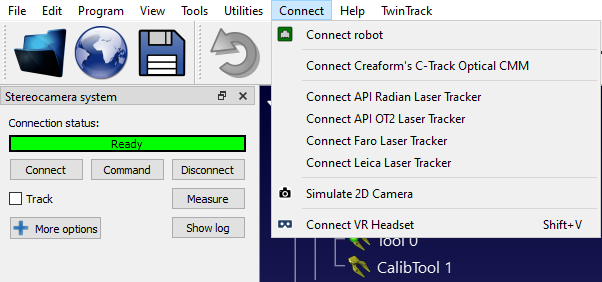
9.Conecte o sistema de medição:
a.Conecte o sistema de medição ao seu computador.
b.Selecione Conectar e conecte-se ao seu sistema de medição. Certifique-se de que o software necessário também esteja instalado. Talvez seja necessário alterar o IP do tracker, dependendo do sistema de medição que você usa.
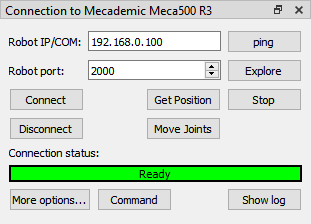
10.Conecte o robô:
a.Selecione Conectar➔ Conectar robô.
b.Digite o IP e a porta do robô.
c.Selecione Conectar.
Calibração do sistema
Esta seção lhe orientará a calibrar o robô e a sonda. Essa etapa só precisa ser realizada uma vez, mas é importante para obter bons resultados de precisão.
Antes de iniciar a calibração, é recomendável carregar os modelos 3D de sua célula. Isso ajudará você a evitar automaticamente as colisões durante o processo de calibração. Se não tiver os modelos 3D de cada componente, você pode simplesmente carregar caixas planas e esferas para representar as áreas que não deseja acessar.
Calibração do robô
Esta seção descreve como calibrar automaticamente o robô usando o RoboDK TwinTrack e o sistema de medição. A calibração do robô permite melhorar a precisão do robô em até 0,150 mm quando você gera programas off-line ou usando as ferramentas de demonstração de ensino do TwinTrack no RoboDK (o nível de precisão depende muito da qualidade e do tamanho do robô).
Recomenda-se realizar a calibração do robô depois que você construir a célula robótica ou fizer grandes modificações (como alterar a carga útil da ferramenta). Isso ajuda a obter a melhor precisão.
Antes de iniciar a calibração, você pode modelar a célula no RoboDK para evitar colisões automaticamente. Você pode usar geometrias básicas, como planos ou cubos, para evitar áreas indesejadas. Você também pode limitar o espaço da articulação do robô.
Você pode selecionar TwinTrack ➔ Calibrar robô para iniciar o procedimento de calibração do robô.
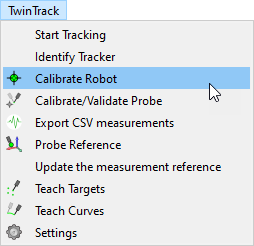
Essa operação guiará você para calibrar o robô, incluindo a geração automática de pontos para calibração e validação. O RoboDK pode gerar automaticamente pontos que são visíveis pelo tracker.
O procedimento de calibração do robô requer a realização de cerca de 200 medições. O procedimento começa com a realização de algumas medições em torno da posição inicial do robô
Quando a configuração estiver pronta e a comunicação com o robô estiver devidamente estabelecida, o procedimento de calibração deverá levar de 15 a 30 minutos.
O sistema não requer dispositivos ou acessórios especiais, ele simplesmente rastreia a posição da ferramenta em relação à referência do tracker.
Não há problema se você perder algumas medições porque os pontos não estão visíveis.
Calibração da sonda
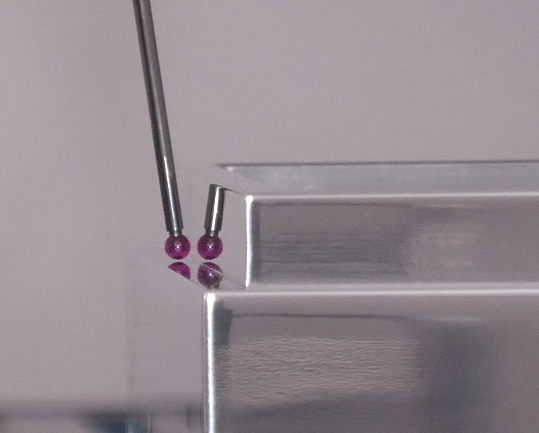
É importante calibrar adequadamente a ponta da sonda e garantir que ela esteja precisa dentro das tolerâncias desejadas.
A calibração da ponta da sonda é realizada movendo-se a ponta em torno de um ponto estático.
Selecione TwinTrack➔ Calibrar/Validar Ponta da Sonda para iniciar a calibração da ferramenta.
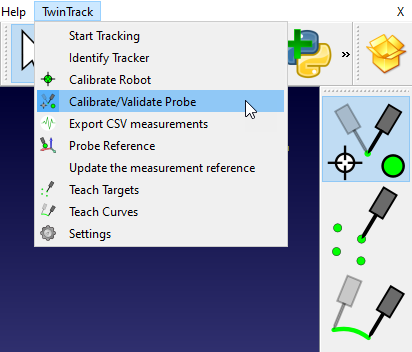
Nesse caso, como estamos usando o Creaform HandyProbe, você pode calibrar a sonda usando o software Creaform VXElements e validá-la usando o RoboDK.
Para validar a ponta da sua sonda, basta mover um ponto estático e o RoboDK exibirá a precisão.
Programação off-line
Você pode usar os recursos de programação por demonstração sem um robô real. Isso significa que você pode simular e programar seu robô off-line somente com seu sistema de medição antes de ter acesso ao robô real.
Você só precisa de uma peça com um sistema de coordenadas bem definido que possa ser usado como referência.
Depois de ter o sistema de medição e a peça prontos, você pode seguir estas etapas para definir o sistema de coordenadas do dispositivo de medição:
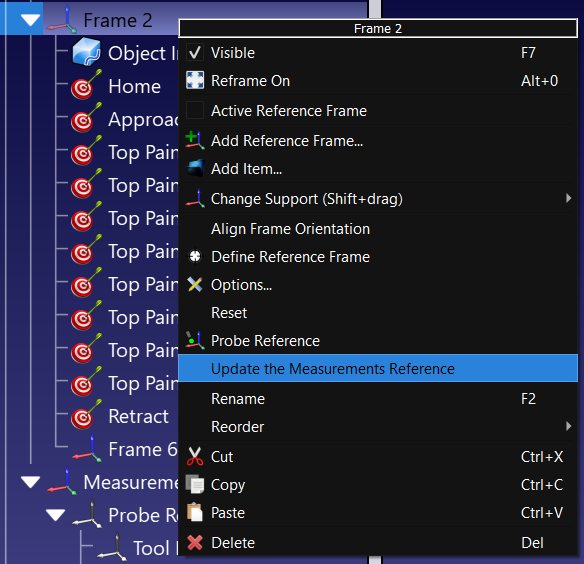
1.Clique com o botão direito do mouse no sistema de coordenadas de sua peça (ou no sistema de coordenadas do gabarito ao qual ela está anexada).
2.Selecione Atualizar a referência de medidas.
3.Siga as instruções na tela para ensinar 3 pontos que definem o sistema de coordenadas: a origem, um ponto em X+ e um ponto em Y+.
O sistema de medição será atualizado de acordo, e você poderá continuar a ensinar pontos, curvas ou outros sistemas de coordenadas.
Marcar pontos
Com o RoboDK TwinTrack, você pode criar pontos de robôs manualmente, marcando os pontos com sua sonda.
Você pode iniciar o modo de ensino de pontos selecionando TwinTrack ➔ Marcar Pontos. Esse botão também está disponível na barra de ferramentas do TwinTrack por padrão.
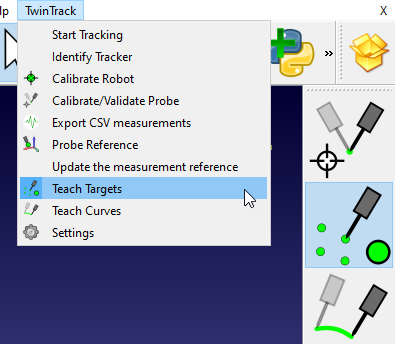
O RoboDK calcula e exibe a posição do robô em tempo real com base na posição de sua mão. Você pode ver facilmente quais áreas podem ser alcançadas pelo seu robô.
Com a opção de criar pontos, você ensinará um ponto a cada vez que pressionar um botão. Quando quiser criar um programa, você pode pressionar o segundo botão da sonda e o RoboDK simulará o programa:
●Primeiro botão: marcar pontos.
●Segundo botão: criar e simular o programa no RoboDK.
●Mantenha o segundo botão pressionado: execute o programa no robô.
Criar curvas
Com o RoboDK TwinTrack, você pode criar trajetórias ou curvas para o robô manualmente com a sonda.
Você pode iniciar o modo de marcação de pontos selecionando TwinTrack ➔ Ensinar curvas. Esse botão também está disponível na barra de ferramentas do TwinTrack por padrão.
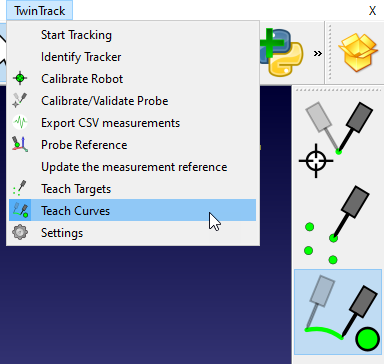
O RoboDK calcula e exibe a posição do robô em tempo real com base na posição de sua mão. Você pode ver facilmente quais áreas podem ser alcançadas pelo seu robô.
Você pode criar uma curva mantendo pressionado o primeiro botão da sua sonda. Quando quiser criar um programa, você pode pressionar o segundo botão da sonda e o RoboDK criará e simulará o programa:
●Mantenha pressionado o primeiro botão: criar curvas/trajetórias.
●Segundo botão: criar e simular o programa no RoboDK.
●Mantenha o segundo botão pressionado: execute o programa no robô.
Ensinar um sistema de coordenadas
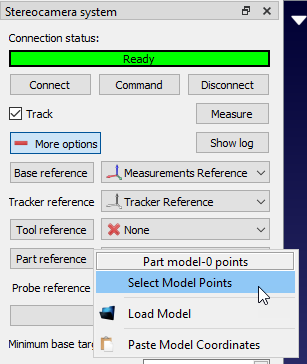
Com o RoboDK TwinTrack, você pode sondar e localizar seus sistemas de coordenadas (ou frames de referência) para localizar objetos no espaço de trabalho do robô.
Clique com o botão direito do mouse em seu sistema de coordenadas e selecione Referência da Sonda.
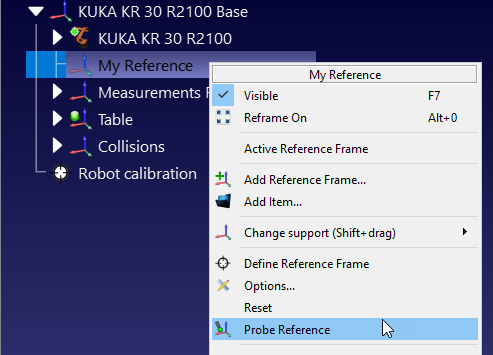
Você deve então sondar 3 pontos na seguinte ordem:
1.Primeiro ponto na origem.
2.Segundo ponto ao longo do eixo X positivo.
3.Terceiro ponto ao longo do eixo Y positivo.
Ao definir corretamente o sistema de coordenadas, você pode programar os robôs remotamente. Por exemplo, se você tiver um dispositivo de fixação adequadamente definido, quando quiser programar uma nova peça, poderá fazê-lo simplesmente do seu escritório ou de casa, sem precisar estar perto do robô.
Criar curvas em movimento
Você pode criar curvas, pontos e sistemas de coordenadas em um objeto em movimento se o seu sistema de medição suportar o rastreamento de vários objetos ao mesmo tempo. Isso pode ser feito seguindo o mesmo procedimento como se eles fossem estáticos.
A principal diferença é que o objeto em movimento precisa ser rastreado em tempo real (usando um tracker ou pontos reflexivos). Por exemplo, se usar o sistema de medição C-Track da Creaform, você deve especificar o modelo na seção de referência da peça e vinculá-lo ao sistema de coordenadas que ele representa.
A dependência correta dos sistemas de coordenadas e dos objetos precisa ser definida no RoboDK para que você possa definir novos sistemas de coordenadas em relação ao seu ponto móvel.
Esse método de programação de peças pode não ser tão preciso quanto quando as peças são estáticas.
Configurações
Esta seção descreve as configurações do TwinTrack que permitem personalizar melhor o comportamento padrão das ações do TwinTrack.
Selecione TwinTrack ➔ Configurações para abrir a janela de configurações mostrada na imagem a seguir.
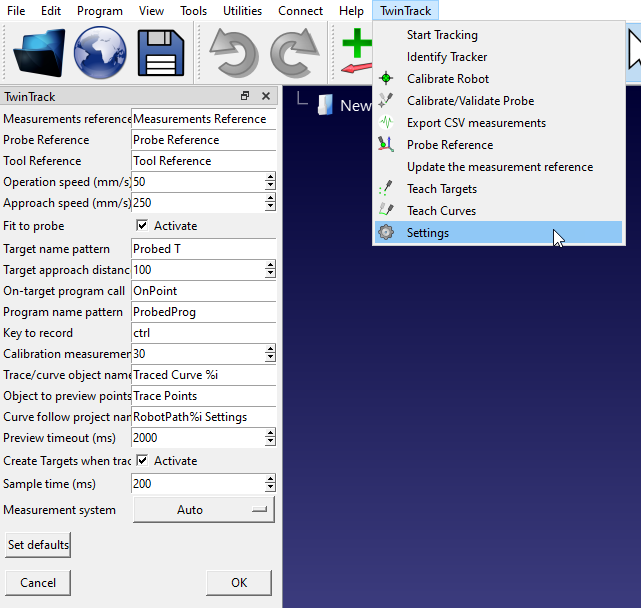
Entre outras coisas, você pode alterar os nomes padrão usados para exibir o dispositivo portátil e os frames de referência. Você também pode personalizar a distância de aproximação da velocidade de aproximação.
Filtragem de programas
Uma vez que o robô tenha sido calibrado, precisamos nos certificar de que geramos programas filtrados ou que levamos em conta os parâmetros calibrados do robô para garantir que aproveitamos a calibração do robô.
Devemos seguir um e somente um dos métodos a seguir para programar os robôs com precisão após a calibração:
1.Use o RoboDK para programação off-line para gerar programas precisos (os programas gerados já estão filtrados). Essa é a opção de programação off-line recomendada para obter os melhores resultados de precisão.
2.Calibrar os parâmetros do controlador do robô (como comprimentos de link, parâmetros DH-DHM e/ou parâmetros de masterização).
Programação off-line precisa
Quando um robô é calibrado com o RoboDK, temos a opção de ativar a cinemática precisa clicando com o botão direito do mouse no robô e selecionando Usar cinemática precisa.
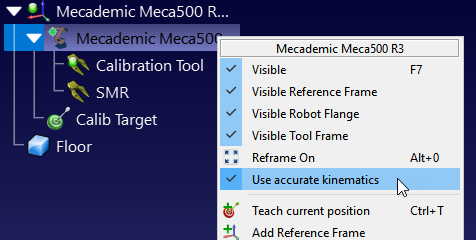
Se a precisão estiver ativa, veremos um ponto verde; se não estiver ativa, veremos um ponto vermelho.
Essa é a opção recomendada para obter resultados de precisão ideais. Com a opção de precisão do robô ativada no RoboDK, todos os programas gerados pelo RoboDK serão automaticamente filtrados. Isso significa que todas as coordenadas cartesianas serão ligeiramente modificadas para compensar os erros do robô.
Essa é a opção mais adequada se você estiver planejando usar seus robôs para usinagem de robôs, programar robôs a partir de arquivos NC ou usar qualquer um dos plugins CAD/CAM suportados pelo RoboDK.
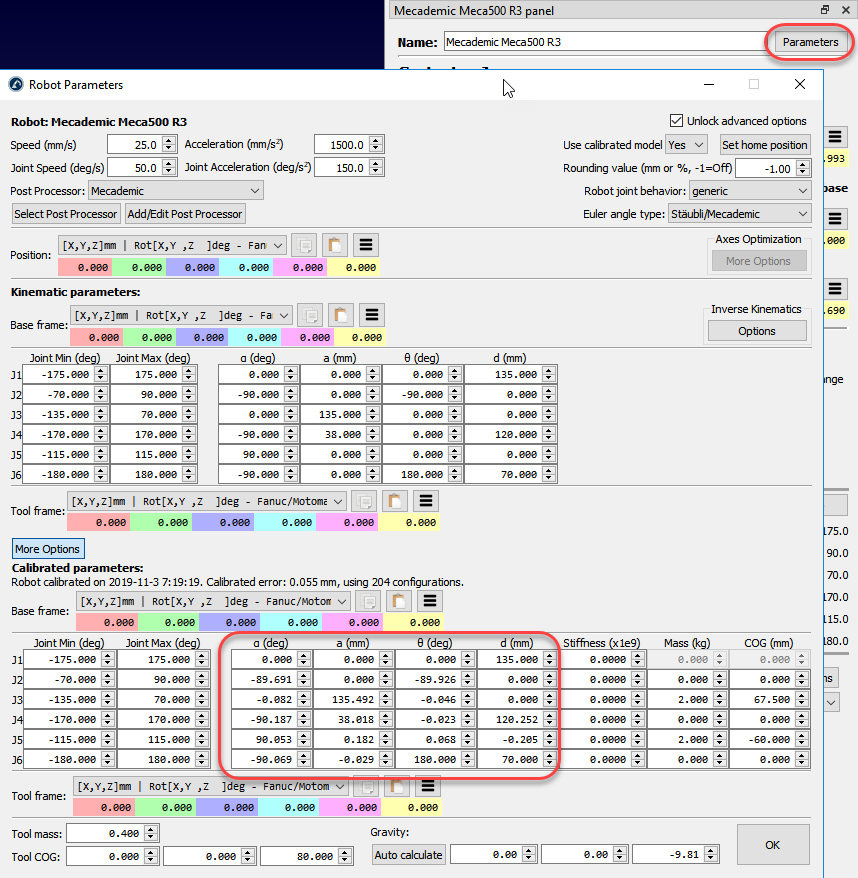
Calibrar os parâmetros do robô
Você pode acessar os parâmetros calibrados no menu Parâmetros depois que um robô tiver sido calibrado. Alguns controladores de robôs permitem a modificação de determinados parâmetros do robô.
Frame de referência e frame de ferramentas
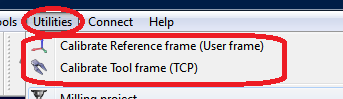
O RoboDK fornece alguns utilitários para calibrar frames de referência e frames de ferramentas. Essas ferramentas podem ser acessadas em Utilitários ➔ Calibrar Frame de Refer6encia e Utilitários ➔ Calibrar Frame de Ferramenta, respectivamente.
Para calibrar um frame de referência ou uma ferramenta que não tenha sido calibrada automaticamente (também conhecido como frame do usuário e TCP, respectivamente), precisamos de algumas configurações do robô que toquem 3 ou mais pontos, essas configurações do robô podem ser valores de eixos ou coordenadas cartesianas (com dados de orientação em alguns casos). Recomenda-se usar os valores dos eixos em vez das coordenadas cartesianas, pois é mais fácil verificar a configuração real do robô no RoboDK (copiando e colando os valores de eixos do robô na tela principal do RoboDK).
Calibração da ferramenta
Selecione Utilitários ➔ Calibrar ferramenta para calibrar o TCP usando o RoboDK. Podemos usar quantos pontos desejarmos, usando diferentes orientações. Mais pontos e mudanças de orientação maiores são melhores, pois obteremos uma estimativa melhor do TCP, bem como uma boa estimativa do erro do TCP.
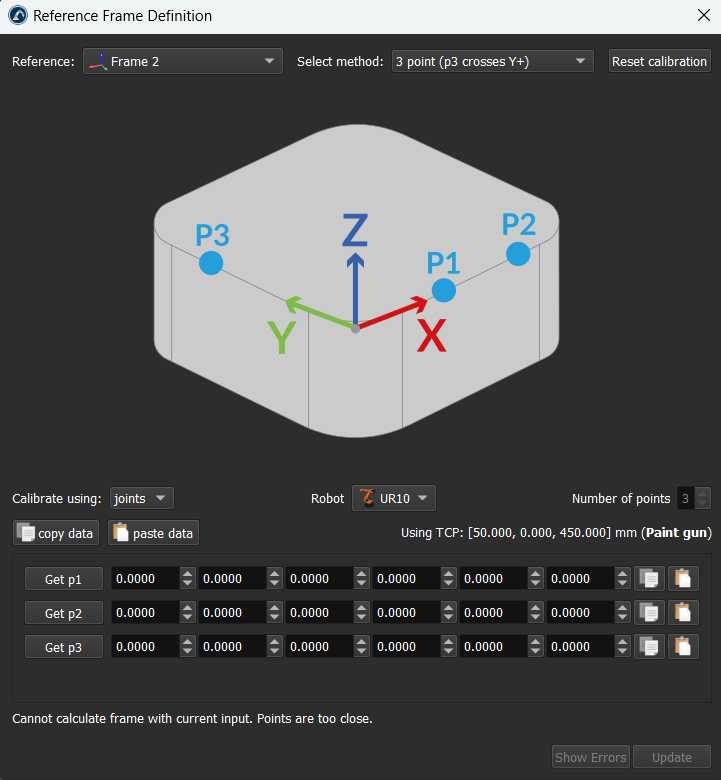
Calibração do frame de referência
Selecione Utilitários ➔ Calibrar referência para calibrar um frame de referência. É possível definir um frame de referência usando diferentes métodos. No exemplo da figura, um frame de referência é definido por três pontos: os pontos 1 e 2 definem a direção do eixo X e o ponto 3 define o eixo Y positivo.
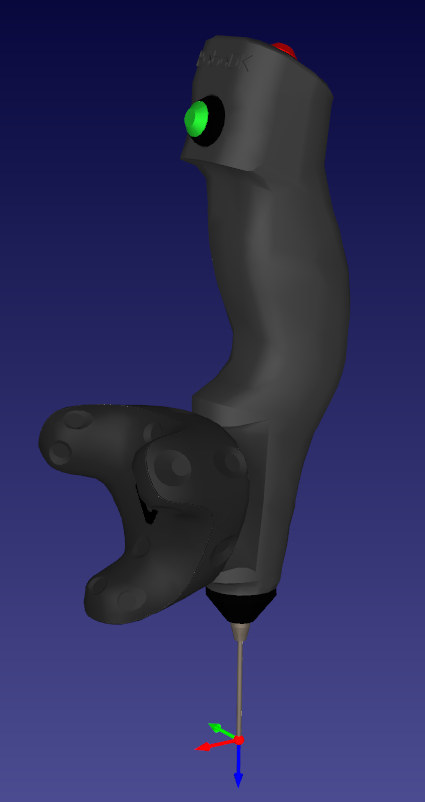
Sonda TwinTrack personalizada
Esta seção mostra como você pode construir uma sonda TwinTrack personalizada para ensinar robôs por meio de demonstração. Uma sonda personalizada permite que você faça seus robôs imitarem as operações de fabricação ensinadas por um ser humano.

Componentes de hardware
A lista de componentes de hardware a seguir permite que você construa uma sonda personalizada para ser usada com o RoboDK TwinTrack.
1.Um HTC Vive Tracker (qualquer versão compatível, recomenda-se a 3.0): HTC Vive Tracker 3 na Amazon. Preço estimado: 200 EUR.

2.Duas estações base Valve Index. Na verdade, qualquer versão deve funcionar, desde que seja compatível com o HTV Vive Tracker correspondente. Estações base Valve na Amazon. Preço estimado: 500 EUR para as duas unidades.

3.Dois tripés para as estações base Valve. Peça de amostra na Amazon. Estimativa de preço: 100 EUR.

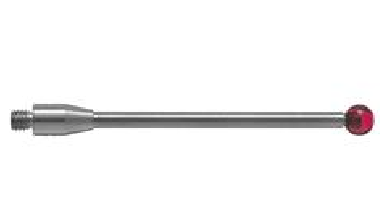
4.Uma esfera de rubi Renishaw com 40 mm de comprimento e 4 mm de diâmetro. Como a A-5003-0060. Preço estimado: 80 euros.
5.Dois botões de pressão, um vermelho e um verde, com 12 mm de diâmetro. Pressionar o botão liga (fecha o circuito), soltar o botão desliga (abre o circuito): Exemplo de produto na Amazon. Preço estimado: 15 euros.

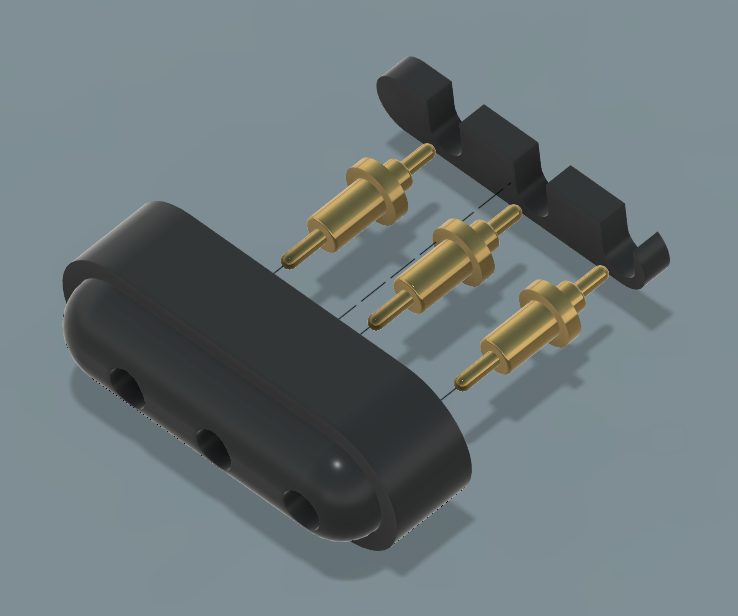
6.Três pinos de pogo com mola 0856-0-15-20-82-14-11-0 (3 unidades). Exemplo de produto da DigiKey . Preço estimado: 20 EUR.

7.Fio elétrico para conectar os interruptores (menos de 1 m). Exemplo de produto na Amazon. Estimativa de preço: 25 euros.

8.Um parafuso com cabeça de botão ¼-20 x 1": Exemplo de produto na Amazon . Estimativa de preço: 10 EUR.

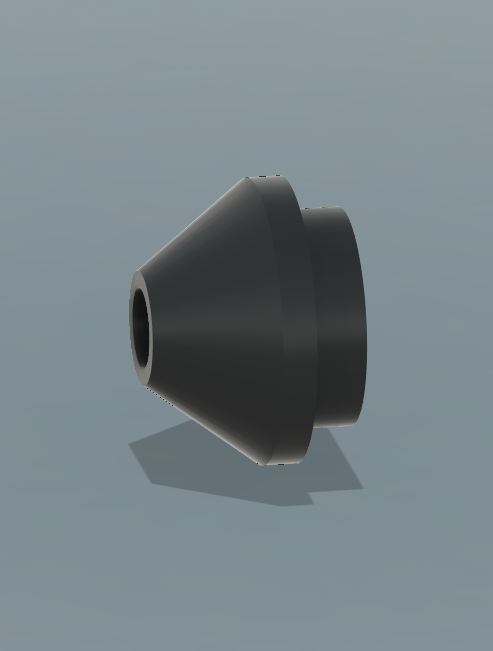
9.Cinco peças impressas em 3D, o corpo principal, o suporte da sonda, a sonda superior, o conector do tracker e a tampa do conector. Você pode fazer o download das peças impressas em 3D necessárias para construir a sonda TwinTrack aqui. As peças impressas em 3D da sonda TwinTrack também estão disponíveis no GrabCad e no Thinginverse.


Conjunto da sonda
Esta seção explica como você pode montar a sonda para o RoboDK TwinTrack. Você precisará das peças necessárias para construir a sonda descrita na seção anterior. Você também precisará de um kit de ferro de solda.
Siga estas etapas para montar a sonda:
1.Monte o conector da seguinte forma e cole as peças impressas.
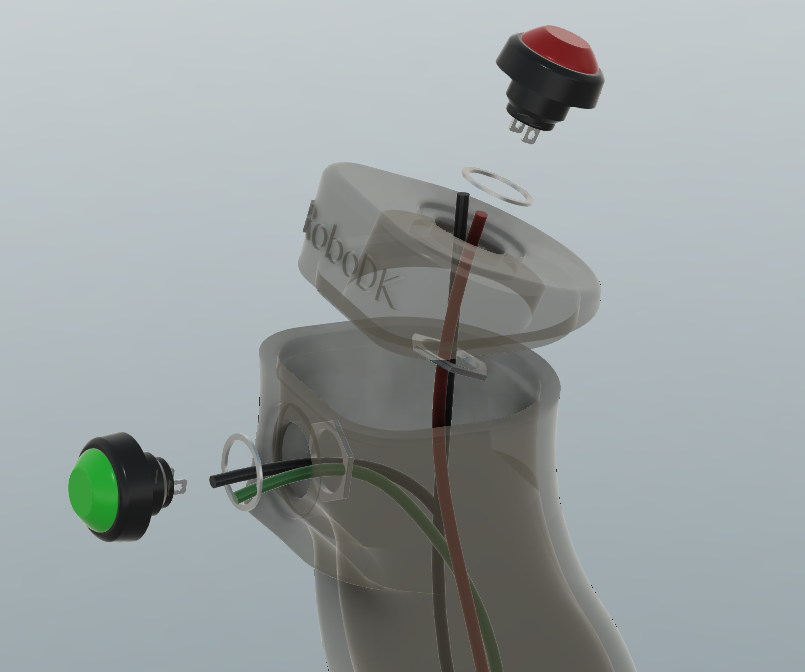
2.Instale os fios dentro do corpo principal e através da peça superior, conforme mostrado na imagem a seguir. Observe que o fio terra está conectado a ambos os interruptores.
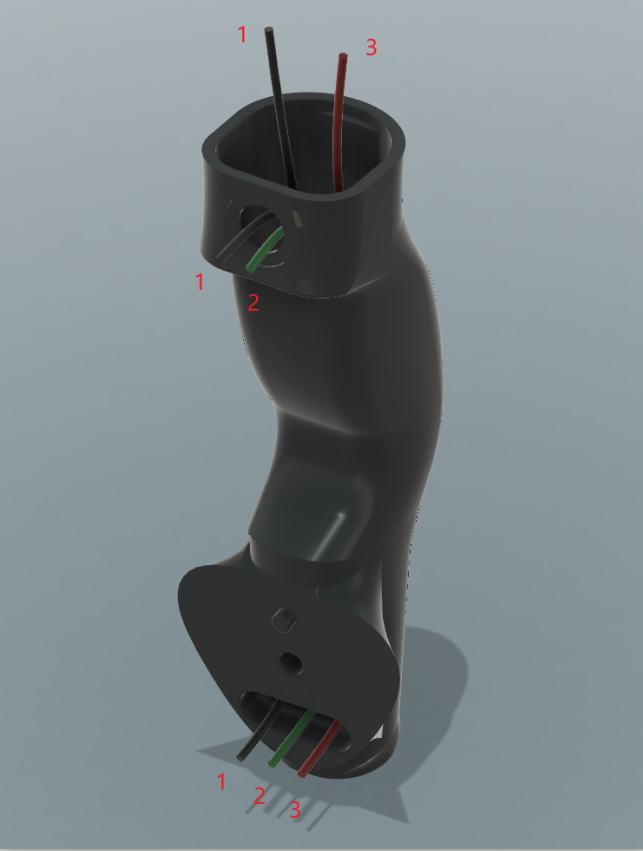
3.Conecte os fios aos interruptores. Os dois pares de fios devem passar pelas porcas do interruptor. Além disso, o fio do interruptor vermelho deve passar pela parte superior. Em seguida, você deve soldar os interruptores (nessa ordem).
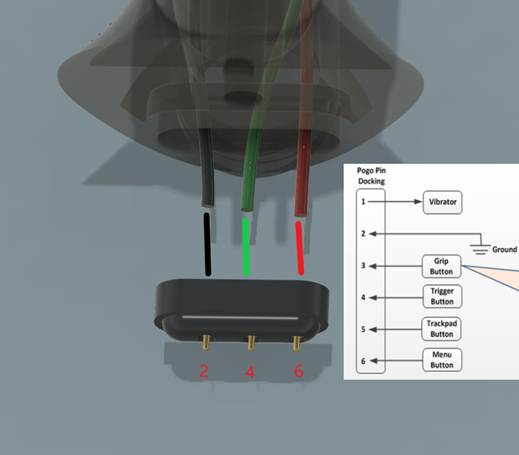
4.Solde o conector aos fios corretos. Certifique-se de colocar os cabos nos conectores corretos.
5.Monte o restante da sonda conforme mostrado na imagem a seguir.
