นำเข้าสิ่งของ 3 มิติ
RoboDK สนับสนุนรูปแบบ 3 มิติส่วนใหญ่เช่นSTL, STEP (or STP) และ IGES (or IGS) รูปแบบอื่นๆเช่นWRML, 3DS หรือ OBJ ยังถูกสนับสนุนเช่นกัน(STEPและ IGES ไม่ได้ถูกสนับสนุนบนเวอร์ชั่นแม็กและลินุกซ์). เพื่อโหลดไฟล์3มิติใหม่:
1.เลือกFile➔
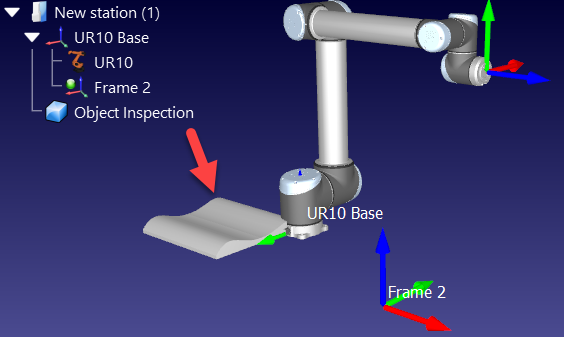
2.เลือกสิ่งของObject Inspectionที่หาได้ในคลังเริ่มต้นของRoboDK:
C:/RoboDK/Library/Object Inspection.
3.อีกทางเลือกหนึ่ง, ลากและปล่อยไฟล์ลงในวินโดว์หลักRoboDK เพื่อนำเข้าอย่างอัตโนมัติ
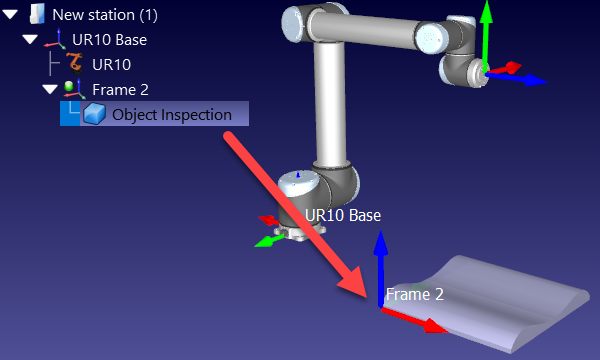
4.ลาก&ปล่อยสิ่งของที่หน้าต่างอ้างอิงFrame 2(ภายในฐานต้นไม้)
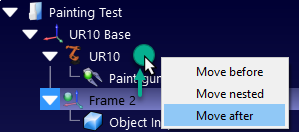
Tip:ลากและปล่อยสิ่งของโดยการกดขวาค้างเพื่อสั่งใหม่ภายในต้นไม้
Important: มันสำคัญอย่างยิ่งที่จะวางสิ่งวางซ้อนกันในหน้าต่างอ้างอิงเพื่อสอนเป้าหมายเกี่ยวข้องกับสิ่งของ จากนั้น, ถ้าหน้าต่างอ้างอิงถูกย้ายเป้าหมายแล้วด้วยกับสิ่งของ
Tip: สำหรับไฟล์STEP หรือ IGES ที่ใหญ่เป็นไปได้ที่จะนำเข้าอย่างแม่นยำโดยการเลือก Tools➔Options➔CAD➔Fast import settingsข้อมูลเพิ่มเติมดูได้ในSTEP/IGES section
Tip: ถึงแม้ว่าสิ่งของจะถูกเคลื่อนย้ายที่เกี่ยวข้องกับหน้าต่างอ้างอิง ถูกแนบไป (โดยการดับเบิ้ลคลิกสิ่งของและเข้าสู่พิกัด) มันถูกแนะนำให้รักษาไว้ตลอดโดยเกี่ยวข้องกับหน้าต่างอ้างอิงที่เขาให้มาและย้ายมากหน้าต่างอ้างอิงแทน อนุญาตให้จับคู่สิ่งของที่อ้างอิงกันอย่างเหมาะสมโดยแค่การอัพเดทหน้าต่างอ้างอิงจาก/ถึง หุ่นยนต์ควบคุม