เพิ่มโปรแกรม
ตามขั้นตอนต่อไปที่เพื่อสร้างโปรแกรมที่ย้ายจากเป้าหมาย Homeไปยังเป้าหมาย Approach :
1.เลือกProgram➔
2.เปลี่ยนชื่อโปรแกรมเป็นApproachMove
3.เลือกเป้าหมายHome
4.เลือกProgram➔
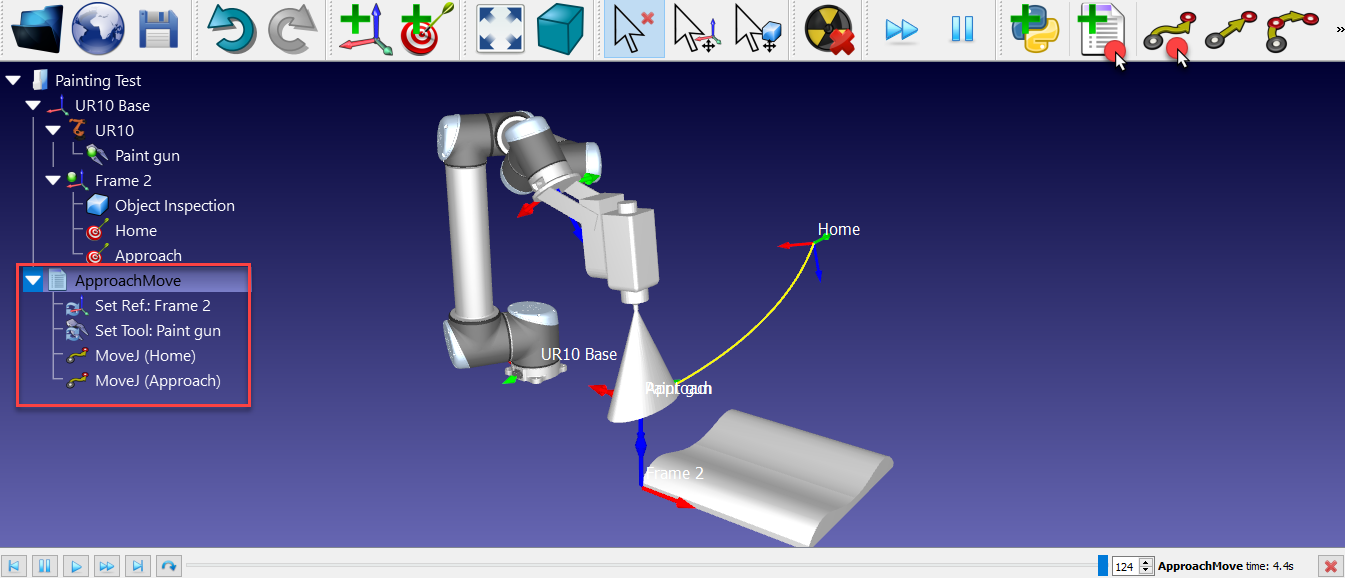
สองคำแนะนำจะถูกใส่อย่างอัตโนมัติเพื่อบอกให้หุ่นยนต์ว่าอะไรคือหน้าต่างเครื่องมือและหน้าต่างอ้างอิงที่พวกเราใช้อยู่
Note: ถ้าไม่มีเป้าหมายถูกเลือก, เป้าหมายใหม่จะถูกสร้างขึ้นในตำแหน่งเดียวกันของหุ่นยนต์
5.เลือกเป้าหมายApproach
6.เลือกProgram➔
ดับเบิ้ลคลิกApproachMoveโปรแกรมและมันจะกระทำการจำลองโปรแกรม แถบการจำลองและเวลาวงจรประมาณจะถูกแสดงผล