ถอนโปรแกรมกลับ
คล้ายกับการปฏิบัติการก่อนหน้านี้:
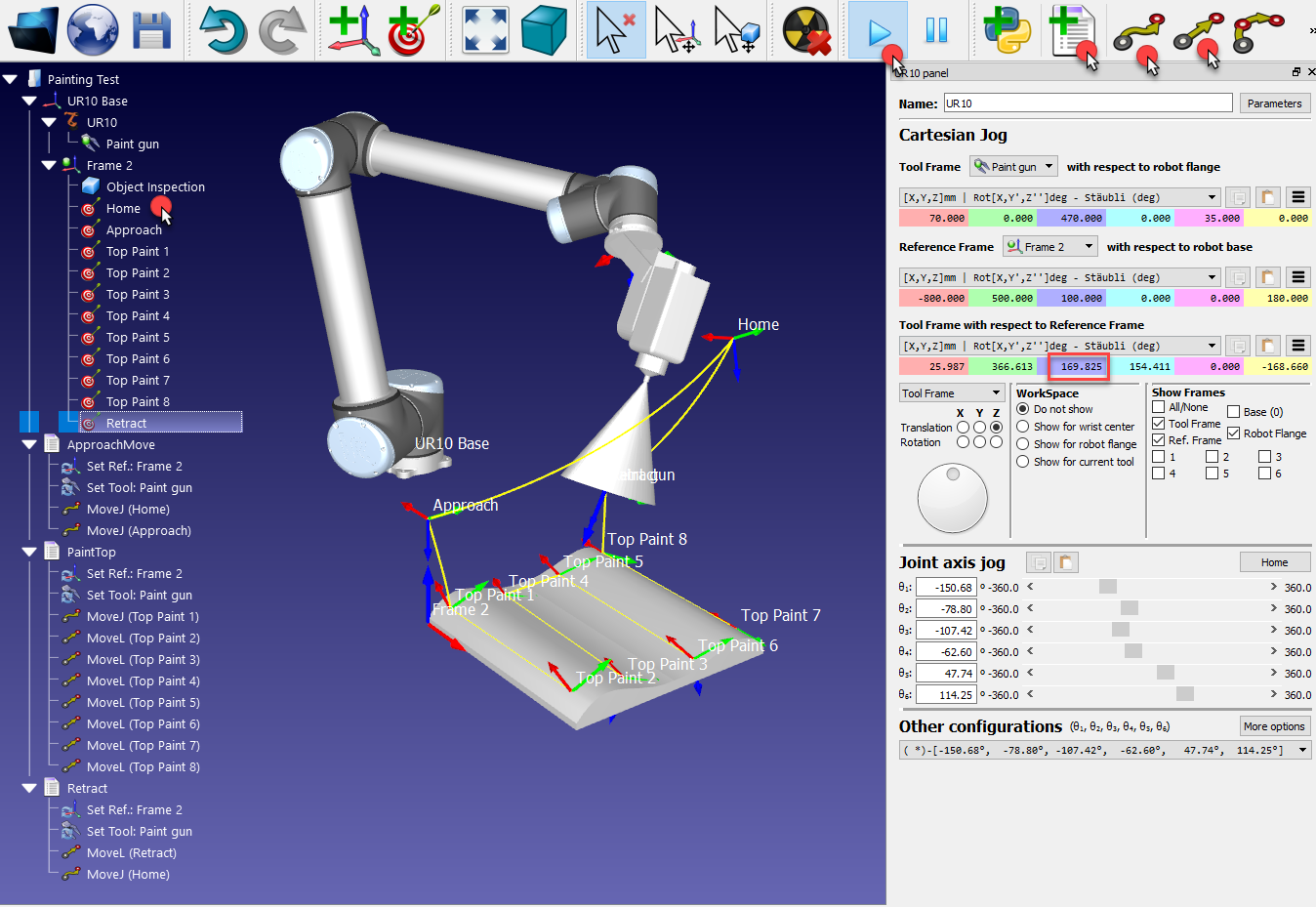
1.ด้วยหุ่นยนต์ที่ถูกวางที่เป้าหมายสุดท้าย, ย้ายหุ่นยนต์ขึ้นไปข้างบนโดยการเพิ่มพิกัดZ ของ TCP ที่เกี่ยวกับหน้าต่างอ้างอิงในแผงปัดหุ่นยนต์(กรณีไฮไลท์ในรูปถัดไป)
2.เลือก Program➔
3.เลือกProgram➔

4.เลือกเป้าหมายHome
5.เลือกProgram➔
จำลองแต่ละโปรแกรมโดยการดับเบิ้ลคลิก การจำลองจะถูกเก่งโดยการกดค้างปุ่ม spacebar และเลือกปุ่มจำลองเร็ว