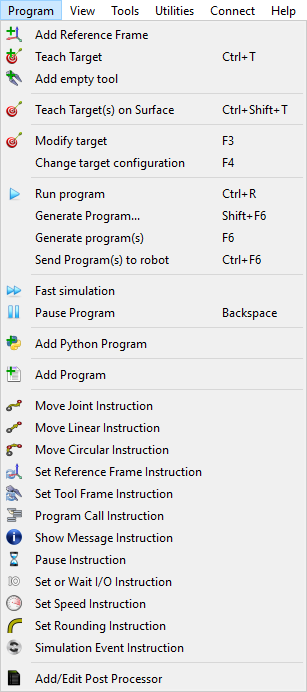
เมนูโปรแกรมประกอบไปด้วยส่วนประกอบต่างๆที่เกี่ยวกับการเขียนโปรแกรมออฟไลน์ (OLP) และการสร้างโปรแกรมขึ้น นอกจากนี้ยังสามารถเพิ่มโปรแกรมใหม่, หน้าต่างอ้างอิง, เป้าหมายหรือเครื่องมือถึงหุ่นยนต์ ส่วนประกอบการเขียนโปรแกรมออฟไลน์เหล่านี้ (หน้าต่างการอ้างอิง,เครื่องมือ,เป้าหมายและอื่นๆ) ปรากฏบนทุกโปรแกรมที่สร้างขึ้นออฟไลน์
Add Reference Frame จะเพิ่มหน้าต่างอ้างอิงใหม่ที่แนบรากฐานหรือแนบกับหน้าต่างอ้างอิงอื่นถ้าหน้าต่างอ้างอิงนั้นถูกเลือก
Add empty tool จะเพิ่ม TCP ใหม่ให้กับหุ่นยนต์ ไม่มีเรขาคณิตที่จำเป็นต้องเพิ่มในเครื่องมือ เครื่องมือหลายอย่างอนุญาตส่วนที่อ้างอิงแตกต่างกันของเรขาคณิตที่เชื่อมต่อกันเป็นเครื่องมือชิ้นหนึ่ง
Teach Target (Ctrl+T) จะเพิ่มเป้าหมายใหม่เพื่อทำให้หน้าต่างอ้างอิงทำงานได้สำหรับเครื่องมือหุ่นยนต์ที่ใช้งานได้ หน้าต่างอ้างอิงที่ใช้งานได้และเครื่องมือใช้งานสามารถถูกเลือกในrobot panel . นอกจากนี้ยังสามารถกดคลิกขวาหน้าต่างอ้างอิงและเครื่องมือเพื่อทำให้สามารถใช้งานได้
Teach Targets on Surface (Ctrl+Shift+T) จะอนุญาตให้ผู้ใช้งานเลือกจุดของสิ่งสร้างเป้าหมาย ดังตัวอย่างที่ใช้งานในthis section .
Add Program จะเพิ่มโปรแกรมใหม่ซึ่งสามารถสร้างการใช้ RoboDKส่วนติดต่อผู้ใช้แบบกราฟิก (GUI) ไม่มีประสบการณ์เขียนโปรแกรมต้องการสร้างหรือปรับเปลี่ยนชนิดนี้ของโปรแกรมหุ่นยนต์ โปรแกรมหุ่นยนต์สามารถถูกจำลองและสร้างขึ้นสำหรับหุ่นยนต์เฉพาะอย่างอัตโนมัติและง่าย
ส่วน Program Instructions ของเอกสารการเขียนโปรแกรมออฟไลน์ทำให้ได้ข้อมูลที่มากขึ้นเกี่ยวกับคำแนะนำโปรแกรมที่ใช้งานได้ผ่าน GUI
Add Python Program ทางเลือกจะรวมถึงตัวอย่างโปรแกรมPython/macro/script/module ในฐานซึ่งเชื่อมต่อกับ RoboDK API โปรแกรมPython ซึ่งใช้ RoboDK API อนุญาตให้สร้างโปรแกรมหุ่นยนต์จากรหัสโปรแกรมทั่วไป (Python) นอกจากนี้ยังสามารถปรับใช้โปรแกรมเหล่านี้สำหรับหุ่นยนต์ควบคุมเฉพาะ นอกจากนี้ยังสามารถจำลองงานเฉพาะหรือเพิ่มในโปรแกรม GUI งานเหล่านี้สามารถเป็นโปรแกรมหุ่นยนต์ย่อยสำหรับการเขียนโปรแกรมออฟไลน์ การเขียนโปรแกรมออนไลน์หรือจำลองเหตุการณ์เฉพาะเช่น ทำสิ่งของให้ปรากฏอย่างอัตโนมัติ ณ จุดสุ่มแต่ภาษาการเขียนโปรแกรมอื่นยังคงถูกใช้กับ RoboDK
Note: ข้อแตกต่างระหว่างโปรแกรมธรรมดา (การใช้ Add Program) สร้างการใช้ติดต่อผู้ใช้แบบกราฟิก (GUI)และโปรแกรมPython(การใช้Add Python Program ) เป็นสิ่งแรกที่ไม่จำเป็นต้องมีประสบการณ์เขียนโปรแกรม ในทางกลับกัน,Python macro ซึ่งใช้ RoboDK APIอนุญาตให้เพิ่มข้อจำกัดของโปรแกรมสร้างขึ้นมาโดยใช้ติดต่อผู้ใช้แบบกราฟิก
สุดท้าย, นอกจากนี้ยังสามารถ Add or Edit Post Processors โพสต์โปรเซสเซอร์กำหนดทางของโปรแกรมถูกสร้างขึ้นสำหรับหุ่นยนต์ควบคุมเฉพาะ, อนุญาตให้อำนวยความสะดวก vendor-specific syntaxโพสต์โปรเซสเซอร์เป็นส่วนประกอบสุดท้ายของกระบวนการเขียนโปรแกรมออฟไลน์