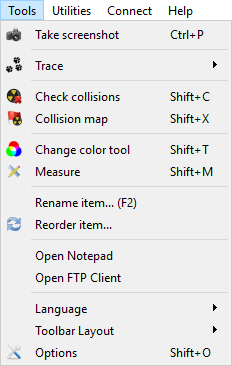
เครื่องมือทั่วไปสามารถใช้ได้ในเมนูเครื่องมือเช่นการนำภาพรวมของมุมมอง 3 มิติ,การเปิดใช้งานเขียนหุ่นยนต์, เปิดใช้งานการตรวจสอบการชนกันหรือการวัดจุดค่าพิกัด
เปิดใช้งาน  การติดตามจะแสดงทางของหุ่นยนต์ที่มันได้เคลื่อนที่
การติดตามจะแสดงทางของหุ่นยนต์ที่มันได้เคลื่อนที่
 Check collisions จะเปิดใช้งานหรือปิดใช้งานการตรวจสอบการชนกัน เมื่อการตรวจสอบการชนกันถูกเปิดใช้งาน, สิ่งของจอยู่ในสถานะชนกันจะขึ้นแสดงเป็นสีแดง
Check collisions จะเปิดใช้งานหรือปิดใช้งานการตรวจสอบการชนกัน เมื่อการตรวจสอบการชนกันถูกเปิดใช้งาน, สิ่งของจอยู่ในสถานะชนกันจะขึ้นแสดงเป็นสีแดง  Collision map อนุญาตให้กำหนดสิ่งของซึ่งมีการทำงานร่วมกันซึ่งได้ถูกตรวจสอบ
Collision map อนุญาตให้กำหนดสิ่งของซึ่งมีการทำงานร่วมกันซึ่งได้ถูกตรวจสอบ
Note: ข้อมูลเพิ่มเติมสามารถดูได้เกี่ยวเนื่องกับตรวจสอบการชนกันในส่วน
Collisions  Change color toolจะแสดงผลวินโดว์เล็กซึ่งอนุญาตให้เปลี่ยนสีของหุ่นยนต์และสิ่งของ นอกจากนี้ยังสามารถดีดระดับเวกเตอร์ของพื้นผิว
Change color toolจะแสดงผลวินโดว์เล็กซึ่งอนุญาตให้เปลี่ยนสีของหุ่นยนต์และสิ่งของ นอกจากนี้ยังสามารถดีดระดับเวกเตอร์ของพื้นผิว
 Measure จะแสดงวินโดว์ซึ่งอนุญาตให้วัดจุด3มิติซึ่งเกี่ยวข้องกับหน้าต่างอ้างอิงหรือฐานหน้าต่างอ้างอิง (การวัดที่แท้จริง)
Measure จะแสดงวินโดว์ซึ่งอนุญาตให้วัดจุด3มิติซึ่งเกี่ยวข้องกับหน้าต่างอ้างอิงหรือฐานหน้าต่างอ้างอิง (การวัดที่แท้จริง)
นอกจากนี้ยังสามารถระบุภาษาของแอพพลิเคชั่น RoboDK โดยการเลือก Tools➔Languageและการเลือกภาษาที่ชื่นชอบ RoboDK จะถูกแสดงผลในภาษาที่เลือกอย่างทันที
Toolbar Layoutอนุญาตการตั้งค่าแถบเครื่องมือเริ่มต้น อีกทางเลือกหนึ่ง,มันยังสามารถระบุแถบเครื่องมือสำหรับพื้นฐานและขั้นสูงเพื่อการใช้งานมากขึ้น
เลือก Options เพื่อเปิดเมนูทางเลือกหลัก ข้อมูลเพิ่มเติมสามารถดูได้ในส่วนOptions Menu
Options เพื่อเปิดเมนูทางเลือกหลัก ข้อมูลเพิ่มเติมสามารถดูได้ในส่วนOptions Menu