เครื่องมือหุ่นยนต์(TCP)
ดับเบิ้ลคลิกเครื่องมือหุ่นยนต์
Note: ท่าทาง TCP สามารถปรับเปลี่ยนได้จากRobot Panel.
การเลือกMore options…อนุญาตให้ปรับเปลี่ยนขนาดปัจจัยเพื่อเรขาคณิตของเครื่องมือหรือเคลื่อนย้ายเรขาคณิตที่เกี่ยวข้องกับหน้าแปลนหุ่นยนต์ อีกทางเลือกหนึ่ง ค่าเหล่านี้ไม่มีผลกระทบบนโปรแกรมหุ่นยนต์ เรขาคณิตเป็นสิ่งที่ใช้สำหรับแสดงผลวัตถุประสงค์และการตรวจสอบการชนกัน (การเก็บ TCP ครบถ้วน)
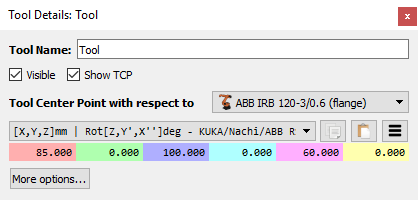
Tip: เป็นไปได้ที่จะจัดหาตำแหน่งของ TCP ที่เกี่ยวข้องกับอีก TCP โดยการเลือกการอ้างอิง TCP แทนที่หน้าแปลนหุ่นยนต์ ดังตัวอย่าง,เครื่องมือตัดสามารถกำหนดระยะทางเฉพาะระหว่างแกน Z เทียบกับ TCP อีกอันหนึ่งซึ่งเป็นตัวแทนแกนหมุน This example ให้ข้อมูลที่มากกว่า