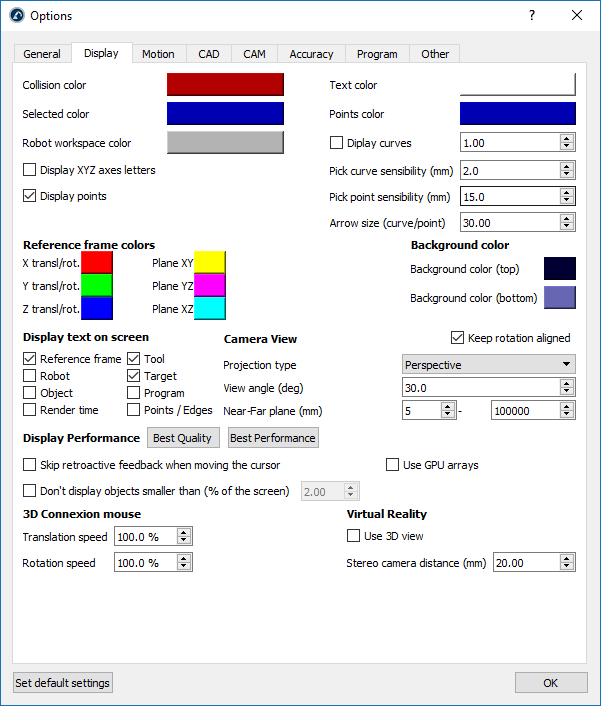
แถบแสดงผล
เลือกสีปุ่มข้างสีการชนกัน, เลือกสี, สีข้อความหรือสีระบายเพื่อเปลี่ยนสีเริ่มต้นในหน้าจอหลัก
เลือกDisplay XYZ axes lettersเพื่อแสดงผลหน้าต่างอ้างอิงด้วยอักษร X, Y, Z ที่เหมือนกันโดยเริ่มต้น,มันไม่ได้ถูกแสดงผลและค่าสีแดงพื้นฐาน (X), เขียว (Y), น้ำเงิน (Z) ได้ถูกใช้งาน
เพิ่มPick curve/point sensibilityเพื่อทำให้ง่ายต่อการเลือกเส้นโค้งและจุดตามลำดับ อีกทางเลือกหนึ่ง,ถ้าเส้นโค้งหรือจุดใกล้เกินไปและมันไม่ได้ง่ายที่จะเลือกสิ่งที่ดีกว่าในการลดค่าเหล่านี้.
Arrow size (curve/point)เป็นขนาดของเส้นสีเขียวซึ่งแสดงในเส้นหรือจุดตามโครงการ (ดูได้จากเมนูUtilities)
สีหน้าต่างอ้างอิงสามารถดูอัพเดทและไล่ระดับสีพื้นหลังด้วยตนเอง (สีพื้นระนาบถูกแสดงเมื่อการย้ายหน้าต่างอ้างอิงด้วย)
The Camera view ตั้งค่าเป็นPerspectiveโดยเริ่มต้น นอกจากนี้ยังสามารถเปลี่ยนเป็นOrthographicและอัพเดทการตั้งค่ากล้องบางตัวเช่นมุมมองมุมและความใกล้/ไกลของพื้นระนาบ
ไม่ได้ตรวจสอบKeep rotation alignedสามารถหมุนอย่างเป็นอิสระในทิศทางใดก็ได้
โดยเริ่มต้นการตั้งค่าหน้าจอเป็นกลุ่มที่ได้รับผลลัพธ์ Best Qualityตั้งค่าDisplay PerformanceถึงBest Performanceถ้า RoboDK ทำให้ช้าลงเพราะมันมีสิ่งของหลายอย่างถูกแสดงอยู่ จะเป็นการบังคับใช้ GUP และจะไม่แสดงผลสิ่งของเล็กในหน้าจอ
นอกจากนี้ยังสามารถใช้3D Connexion mouse, เช่น SpaceNavigator และเปลี่ยนย้ายค่าเริ่มต้นและความเร็วการหมุนที่ใช้เมาส์
นอกจากนี้ยังสามารถแสดงผล RoboDK บนหน้าจอ3มิติ (ใช้มุมมอง3มิติสำหรับมุมมองเสมือนจริง). ระยะทางกล้องสเตอริโอจะกำหนดวิธีปิดหรือความรู้สึกความไกลของสิ่งของ