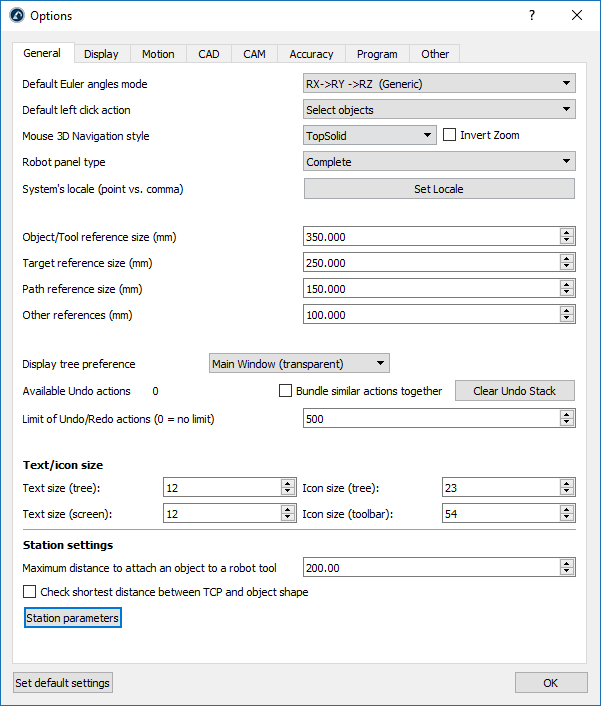
แถบทั่วไป
Default Euler angles mode อนุญาตให้เลือกคำสั่งซึ่งการหมุนหน้าต่างสามารถทำได้เสร็จโดยเริ่มต้น หน้าต่างอ้างอิงทั่วไปประกอบไปด้วยข้อมูลตำแหน่งและการหมุน หน้าต่างอ้างอิงเป็นท่าทางและสามารถเป็นตัวแทนของตำแหน่ง XYZ และการหมุนรอบ X, Y และZ คำสั่งของการหมุนเป็นสิ่งสำคัญ RoboDK จะมีการเลือกก่อนจะเป็น รูปแบบ/คำสั่ง ที่ถูกต้อง ขึ้นอยู่กับหุ่นยนต์ที่ใช้ ดูในส่วนสำหรับข้อมูลที่มากกว่านี้reference frames
Default left click actionเป็นชุดการเลือกสิ่งของตั้งแต่เริ่มต้น นอกจากนี้สามารถเปลี่ยนเป็นการตั้งค่านำทาง 3มิติ ดังตัวอย่าง, หมุนโดยเริ่มต้น
เนื่องด้วยMouse 3D Navigation style, ยังสามารถระบุชนิดที่ชื่นชอบของการนำทาง 3 มิติด้วยเมาส์และเลียนแบบซอฟต์แวร์เฉพาะ เช่น Rhinoceros, Catia, TopSolid หรือ Vero software.
Robot panel type เป็นชุดCompleteโดยเริ่มต้น มันจะแสดงแผงหน้าปัดสมบูรณ์ ตั้งค่าทางเลือกเป็นธรรมดาหรือพื้นฐานตัวเลขของทางเลือกที่สามารถใช้ได้ในแผงหน้าปัดหุ่นยนต์
สถานที่ของระบบอนุญาตให้ตั้งภาษาเฉพาะและประเทศ จะแสดงตัวเลขและรูปแบบที่ถูกต้องและการใช้ตัวอักษรจุดทศนิยมอย่างเหมาะสม
Object/Target/Path/Other reference sizeจะกำหนดขนาดของหน้าต่างบนหน้าจอสำหรับไอเทมเฉพาะ นอกจากนี้ยังสามารถใช้เครื่องหมาย + และ – แทนที่การเพิ่มหรือหดขนาดตามสัดส่วน
Display tree preference จะแสดงฐานต้นไม้ภายในวินโดว์หลักโดยเริ่มต้น เปลี่ยนมันSide Windowเพื่อแสดงต้นไม้เป็นวินโดว์แยกกัน นอกจากนี้ยังสามารถClear the Undo Stackจัดการหน่วยความจำและยังจำกัดการแก้ไข/ทำซ้ำซึ่งจะถูกเก็บไว้ในหน่วยความจำถ้า RoboDK ทำให้ช้าลงมันจะสามารถเป็นการแก้ไขจำนวนมากที่ถูกเก็บไว้ โดยเริ่มต้น,การกระทำที่คล้ายกันไม่ถูกจับเป็นกลุ่มด้วยกัน, ดังตัวอย่าง,ถ้าหน้าต่างอ้างอิงถูกเคลื่อนย้าย, ทุกขั้นตอนเล็กๆจะถูกบันทึก ตรวจสอบBundle similar actions togetherเพื่อหลีกเลี่ยงพฤติกรรมดังกล่าว
ส่วน Text/icon size อนุญาตให้เปลี่ยนขนาดของตัวอักษรและไอคอนในต้นไม้และแถบเครื่องมือ
Maximum distance to attach an object to a robot toolถูกใช้โดย simulation event เหตุการณ์จำลองสามารถแนบสิ่งของเป็นเครื่องมือและจำลองเหตุการณ์เฉพาะ เหตุการณ์เหล่านี้ไม่มีผลกระทบในการสร้างโค้ด, เป็นเพียงแต่การใช้แบบเพื่อจุดประสงค์การจำลอง
Station parametersเป็นสถานะพารามิเตอร์ซึ่งถูกเก็บไว้ในไฟล์ RDK และสามารถปรับเปลี่ยนได้ด้วยตนเองหรือผ่าน API ในฐานพารามิเตอร์อนุญาตให้จำลองDigital Inputs and Digital Outputs และติดต่อสื่อสารการจำลองกับระบบอื่นผ่าน API เช่น PLC