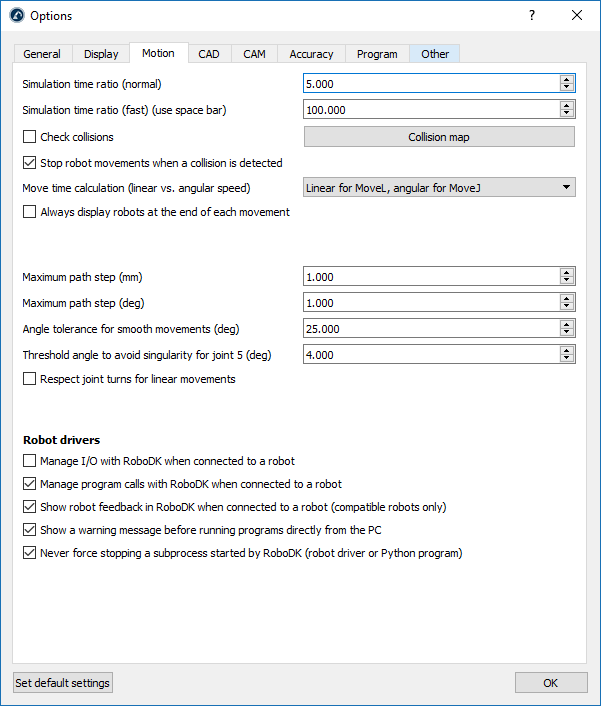
แถบการเคลื่อนไหว
สัดส่วนเวลาการจำลองกำหนดความเร็วการจำลองที่เกิดขึ้นกับเวลาจริง การเริ่มต้นการจำลองของ 5 หมายถึง 1 วินาทีใช้บนแบบจำลองเท่ากับ 5 วินาทีในเวลาจริง การดำเนินการบนหุ่นยนต์ ข้อมูลเพิ่มเติมดูได้จากส่วน Simulation ratio



การคำนวณเคลื่อนที่เวลาถูกจำกัดความว่าRoboDK คำนวณวงจรเวลาและวิธีที่หุ่นยนต์ใช้ เส้นตรง/เชิงมุม ความเร็ว/ความเร็ง สำหรับการจำลองและจับเวลา ข้อมูลเพิ่มเติมดูได้ในCycle Time section
ถ้าสัดส่วนการจำลองมันเร็วเกินไป คอมพิวเตอร์อาจจะไม่สามารถแสดงผลหุ่นยนต์ในตอนของแต่ละส่วนที่เก็บการจำลองด้วยความเร็ว เพื่อหลีกเลี่ยงผลกระทบนี้ ตรวจสอบAlways display robots at the end of each movement.
ขั้นตอนทางที่มากที่สุด (mm/deg) กำหนดว่าRoboDK แสดงผลเส้นตรงหรือ move joint อย่างเป็นลำดับสำหรับจุดประสงค์เพื่อการจำลอง
Threshold angle to avoid singularity for joint 5 (deg)ถูกใช้ในหุ่นยนต์ 6 แกนเพื่อหลีกเลี่ยง wrist เฉพาะตัว ถ้าลักษณะเฉพาะตัวถูกตรวจจับ, โปรแกรมหุ่นยนต์จะถูกเปลี่ยนเพื่อทำให้แน่ใจว่าโปรแกรมจะดำเนินการอย่างเหมาะสมบนตัวควบคุมจริง
ส่วน Robot driversอนุญาตเพื่อทำให้พฤติกรรมเป็นเฉพาะของไดร์เวอร์หุ่นยนต์ ไดร์เวอร์หุ่นยนต์อนุญาตให้มีค่าพารามิเตอร์เชื่อมระหว่างหุ่นยนต์จริงและRoboDK
จัดการ I/O ด้วย RoboDK เมื่อเชื่อมต่อกับหุ่นยนต์จะจำลองสิ่งที่ป้อนเข้าไปและแสดงผลออกมาพารามิเตอร์ฐาน RoboDK แทนที่ของการเลือกสถานะของสิ่งที่ป้อนเข้าไป/แสดงผลออกมาบนหุ่นยนต์
ทางเลือก Show robot feedback in RoboDK when connected to a robotจะแสดงผลการเคลื่อนที่ของหุ่นยนต์ในเวลาจริงเหมือนการเคลื่อนที่ของหุ่นยนต์
แสดงข้อความตักเตือนก่อนการดำเนินการโปรแกรมโดยตรงผ่าน PC จะแสดงป็อปอัพก่อนโปรแกรมจะถูกปฏิบัติการจากคอมพิวเตอร์ (เมื่อใช้การเริ่มต้นจากตัวหุ่นยนต์)
ไม่ได้ตรวจสอบNever force stopping a subprocess started by RoboDKถ้าคุณเคยประสบกับปัญหากับไดร์เวอร์หุ่นยนต์ เป็นการแสดงให้แน่ชัดว่าขั้นตอนอื่นจะถูกดำเนินการหลังหน้าจอเมื่อการเชื่อมต่อใหม่ถูกตั้งค่า