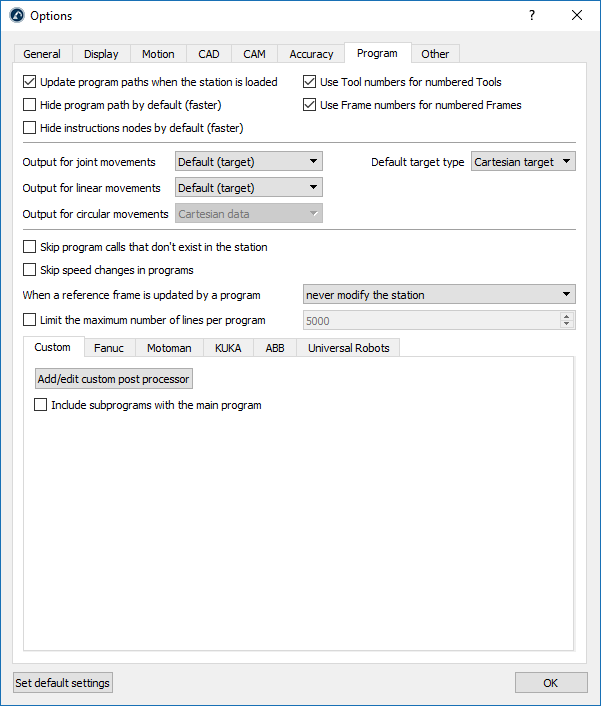
แถบโปรแกรม
แถบโปรแกรมแสดงผลการตั้งค่าที่เกี่ยวข้องกับprograms.
ตรวจสอบUpdate program paths when the station is loadedจะอัพเดทปัญหาของโปรแกรมและแสดงผลโปรแกรมว่ามีปัญหากับเครื่องหมายเตือน: 
การตรวจสอบHide program path by defaultจะไม่แสดงผลเส้นทางโปรแกรมเมื่อโปรแกรมใหม่ถูกสร้างขึ้น คลิกขวาที่โปรแกรมและตรวจสอบ/ไม่ตรวจสอบDisplay pathอย่างเป็นลำดับเพื่อ แสดง/ซ่อน เส้นสีเหลือของหุ่นยนต์ TCP
Use Tool/Frame numbers for numbered Tools/Framesจะใช้เลขลงทะเบียนที่เหมือนกันกันของเครื่องมือ/หน้าต่างอ้างอิงแทนที่การอัพเดทเครื่องมือและลักษณะหน้าต่างอ้างอิงบนหุ่นยนต์ควบคุม สามารถใช้งานหุ่นยนต์ควบคุมซึ่งส่วนใหญ่จะใช้เลขลงทะเบียนแทนตัวแปร พฤติกรรมนี้สามารถปรับแต่งการใช้โพสต์โปรเซสเซอร์
นอกจากนี้ยังสามารถบังคับเป้าหมายเฉพาะOutput for joint/linear movements บนการเขียนโปรแกรม, โดยการจัดเก็บร่วมกันหรือข้อมูลคาร์ทีเซียน โดยเริ่มต้น, RoboDK จะใช้การตั้งค่าเป้าหมาย (การร่วมพิกัดสำหรับเป้าหมายร่วมกันและพิกัดคาร์ทีเซียนสำหรับเป้าหมายคาร์ทีเซียน)
โดยเริ่มต้น, RoboDK จะสร้างเป้าหมายใหม่เป็นเป้าหมายคาร์ทีเซียน, นั้นหมายความว่าถ้าหน้าต่างอ้างอิงถูกย้าย, ตำแหน่งของหุ่นยนต์จะเข้าถึงเป้าหมายจะแตกต่างกัน นอกจากนี้ยังสามารถเลือกเป้าหมายร่วมกันเพื่อกำหนดเป้าหมายที่แท้จริงซึ่งไม่สามารถเปลี่ยนขึ้นอยู่กับ การอ้างอิง/การเปลี่ยนเครื่องมือ
เลือกSkip program calls that don’t exist in the stationเพื่อละเลยการสร้างโปรแกรม
Limit the maximum number of lines per programสามารถใช้ตรวจสอบเฉพาะหลายเส้นบนโปรแกรมจะมีส่วนมาก โดยจะแยกโปรแกรมระยะยาวในโปรแกรมย่อยและจะสร้างโปรแกรมหลักซึงดำเนินเป็นขั้นเป็นตอนในโปรแกรมที่เล็กกว่า หุ่นยนต์ควบคุมมีข้อจำกัดเรื่องความจุและสามารถใช้งานในขนาดที่เหมาะสม ยกเว้นหุ่นยนต์ควบคุมเฉพาะ/เก่ากว่า สามารถจัดการ 500 เส้นในหนึ่งโปรแกรม
สุดท้าย, การตั้งค่าเฉพาะจะใช้ได้สำหรับแบรนด์หุ่นยนต์เฉพาะ เมื่อใช้การสร้างในโพสต์โปรเซสเซอร์ ในทางกลับกัน, กำหนดโพสต์โปรเซสเซอร์เองถูกอนุญาตให้ออกแบบเองหรือกำหนดเองอย่างเหมาะสมก่อนโปรแกรมจะถูกสร้างขึ้น