แบบจำลอง C#
โปรแกรม C# ถูกจำลองโดยการใช้ค่าเริ่มต้นเมื่อคำสั่งหุ่นยนต์ถูกใช้ (ดังตัวอย่าง MoveJ, MoveL หรือ setDO) เมื่อตัวอย่าง C# project ถูกเริ่มต้น, โหมดการจำลองถูกเลือกโดยค่าเริ่มต้น
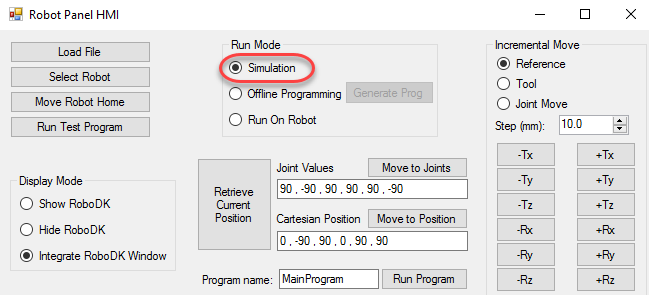
นั้นหมายความว่าการเคลื่อนที่หุ่นยนต์จะถูกจำลองใน RoboDK. ดังตัวอย่าง, พวกเราสามารถย้ายหุ่นยนต์เป็นขั้นตอนของ 10 mm เลือกปุ่มบนขวา (+Tx, -Tx, …), หรือเราสามารถเลือกดำเนินการทดสอบโปรแกรมเพื่อดำเนินการเคลื่อนที่หกเหลี่ยมรอบพื้นที่ล่าสุดของหุ่นยนต์
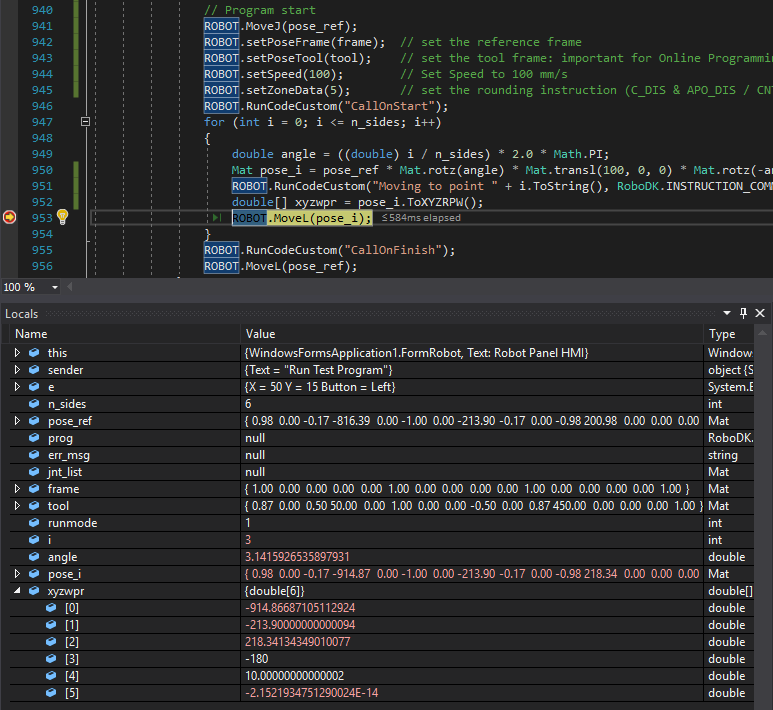
ตั้งค่าคำสั่งพักเพื่อแก้ปัญหาแอพพลิเคชั่นของคุณและตรวจสอบเป้าหมายหุ่นยนต์ เป้าหมายหุ่นยนต์สามารถกำหนดได้จากพิกัดร่วมกันหรือตัวแปร Mat (ลักษณะเมทริกซ์4x4) และสามารถถูกตรวจสอบจากรูปแบบ XYZWPR เพื่อแก้ไขปัญหาโปรแกรม ข้อมูลเพิ่มเติมเกี่ยวกับหน้าต่างอ้างอิงในส่วนReference Frames
อีกทั้งยังสามารถเปลี่ยนโหมดดำเนินการOffline ProgrammingหรือOnline Programming (ดำเนินการหุ่นยนต์), ตามที่แสดงในส่วนถัดไป