RoboDK API
Pythonเป็นภาษาเขียนโปรแกรมขั้นสูงที่ใช้กันอย่างกว้างขวางสำหรับจุดประสงค์เพื่อการเขียนPython เป็นภาษาการเขียนโปรแกรมซึ่งให้คุณทำงานได้เร็วขึ้นและดำเนินการระบบของคุณให้มีประสิทธิภาพยิ่งขึ้น Python's syntax อนุญาตให้คนเขียนโปรแกรมต่อยอดแนวความคิดเส้นบางอันของโค้ดซึ่งถูกเปรียบเทียบกับภาษาอื่น, ทำให้เป็นมิตรและง่ายต่อการเรียนรู้
previous sectionอธิบายถึงข้อได้เปรียบของการใช้ RoboDK API ซึ่งเป็นภาษาโปรแกรมที่ใช้งานกว้างขวางสำหรับการเขียนโปรแกรมเช่น Python
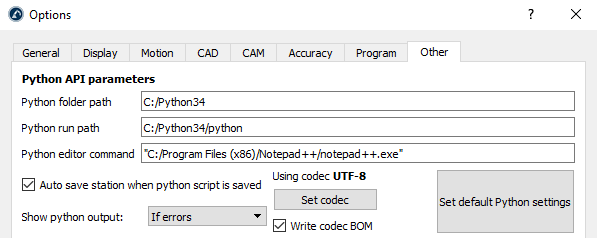
Python ถูกติดตั้งอย่างอัตโนมัติและดำเนินการด้วย RoboDK โดยเริ่มต้น Select Tools➔Options➔Otherเพื่อเปลี่ยนเป็นการตั้งค่าเริ่มต้น (ตำแหน่งPython และตัวแก้ไขPython)
The RoboDK API สำหรับ Python ถูกแบ่งตามสองโมดูลต่อไปนี้:
● โมดูลrobolink (robolink.py): โมดูล robolinkคือการเชื่อมต่อระหว่าง RoboDK และ Python. สิ่งของใดๆในฐานต้นไม้RoboDK สามารถเอาคืนกลับมาโดยใช้สิ่งของRobolinkและถูกแสดงเป็นสิ่งของไอเทมอีกทั้งยังสามารถแสดงระบบปฏิบัติการที่แตกต่างกันได้บนไอเทมซึ่ง Robolink.Item
● โมดูล robodk (robodk.py): โมดูล robodkเป็นแถบเครื่องมือหุ่นยนต์สำหรับ Python ซึ่งอนุญาตให้ทำงานกับลักษณะการเปลี่ยนแปลงและได้รับมุมออยเลอร์สำหรับผู้ขายหุ่นยนต์แต่ละชนิด โดยลักษณะของหน่วยประมวลผลขึ้นอยู่กับโมดูล robodk
โมดูล Python ถูกตั้งในโฟลเดอร์ C:/RoboDK/Python/ และถูกคัดลอกไปยังทางโฟลเดอร์ Python อย่างอัตโนมัติเมื่อ RoboDK ถูกติดตั้งหรือเมื่อตั้งค่าSet default Python settingsถูกเลือก (ดูได้จากรูปก่อนหน้า)
ตามหัวข้อย่อยที่แสดงวิธีการสร้างโปรแกรมทั่วไปสำหรับการลอง, การเขียนโปรแกรมออฟไลน์และการเขียนโปรแกรมออนไลน์ตามลำดับ ตัวอย่างมากกว่านี้สามารถดูได้จากหน้าPython API for RoboDKอีกทั้งคลัง RoboDK มาจากตัวอย่าง Python macros ในโฟลเดอร์ C:/RoboDK/Library/Macros/
ตามขั้นตอนเหล่านี้เพื่อตั้งค่าโครงการตัวอย่างเพื่อใช้ UR และจำลองการเคลื่อนที่ของหุ่นยนต์
1.เลือกFile➔![]() Open
Open
2.เปิดหุ่นยนต์UR10
3.เลือกFile➔![]() Open
Open
4.เปิดไฟล์Paint_gun.tool
5.เปิดตัวอย่างโปรแกรม Python SampleOfflineProgramming.pyจาก C:/RoboDK/Library/Macros/
6.ดับเบิ้ลคลิกไอเทมSampleOfflineProgrammingเพื่อดำเนินการจำลอง หุ่นยนต์ควรจะวาดหกเหลี่ยมรอบพื้นที่ล่าสุดของหุ่นยนต์และการติดตามTCP จะถูกแสดงผลในสีเหลือง
อีกทางเลือกหนึ่ง, คลิกขวาที่โปรแกรมและเลือก![]() Run Python Script.
Run Python Script.
7.คลิกขวาที่ไอเทม![]() SampleOfflineProgrammingและเลือกEdit Python Scriptพวกเราควรเห็นโปรแกรมตามที่ถูกแสดงในรูปถัดไป
SampleOfflineProgrammingและเลือกEdit Python Scriptพวกเราควรเห็นโปรแกรมตามที่ถูกแสดงในรูปถัดไป
SampleOfflineProgramming macro จะวาดรูปหลายเหลี่ยมของด้านn_sidesและรัศมีRจุดพื้นที่ล่าสุดของหุ่นยนต์, ซึ่งเกี่ยวข้องกับหน้าต่างอ้างอิงหุ่นยนต์, ถ้าต้องการ, ย้ายหุ่นยนต์ไปในที่ต่างกันโดยการเปลี่ยนมิติของรูปหลายเหลี่ยมและดำเนินการโปรแกรมใหม่
ตัวอย่างนี้คล้ายกับโปแกรมที่ถูกแสดงผลในส่วน offline programming ในเว็บไซต์ (รวมถึงวีดีโอ)

โปรแกรม Python สามารถถูกสร้างออฟไลน์เพื่อใช้โค้ด Python เดียวกันเพื่อถูกใช้จำลองหุ่นยนต์ (ตามที่แสดงในส่วนก่อนหน้าPython Simulation) การเขียนโปรแกรมออฟไลน์อนุญาตการสร้างโปรแกรมหุ่นยนต์ซึ่งสามารถถูกดำเนินการบนหุ่นยนต์ควบคุมเฉพาะ:
1.คลิกขวาที่โปรแกรม![]()
2.เลือกGenerate robot program (F6)
ในกรณีนี้โปรแกรมไม่ได้ถูกจำลองแต่ดำเนินการอย่างรวดเร็วเพื่อจะได้ผลลัพธ์: โปรแกรมหุ่นยนต์เฉพาะเพื่อหุ่นยนต์ควบคุม

RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)
โปรแกรม Python สามารถถูกดำเนินการโดยตรงบนหุ่นยนต์โดยการใช้โค้ดPython ที่เหมือนกันเพื่อใช้จำลองหุ่นยนต์(ตามที่แสดงในส่วนของPython Simulation ). การเขียนโปรแกรมออนไลน์อนุญาตให้ดำเนินการบนโปรแกรมทั่วไปบนหุ่นยนต์ควบคุมเฉพาะที่ใช้ไดร์เวอร์หุ่นยนต์:
1.คลิกขวาที่โปรแกรม![]() Python
Python
2.เลือกRun on robot
โปรแกรมจะดำเนินการบนโปรแกรมโดยโปรแกรม program ถูกใช้งาน

RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)