ตัวอย่าง Python
ตามขั้นตอนเหล่านี้เพื่อตั้งค่าโครงการตัวอย่างเพื่อใช้ UR และจำลองการเคลื่อนที่ของหุ่นยนต์
1.เลือกFile➔
2.เปิดหุ่นยนต์UR10
3.เลือกFile➔
4.เปิดไฟล์Paint_gun.tool
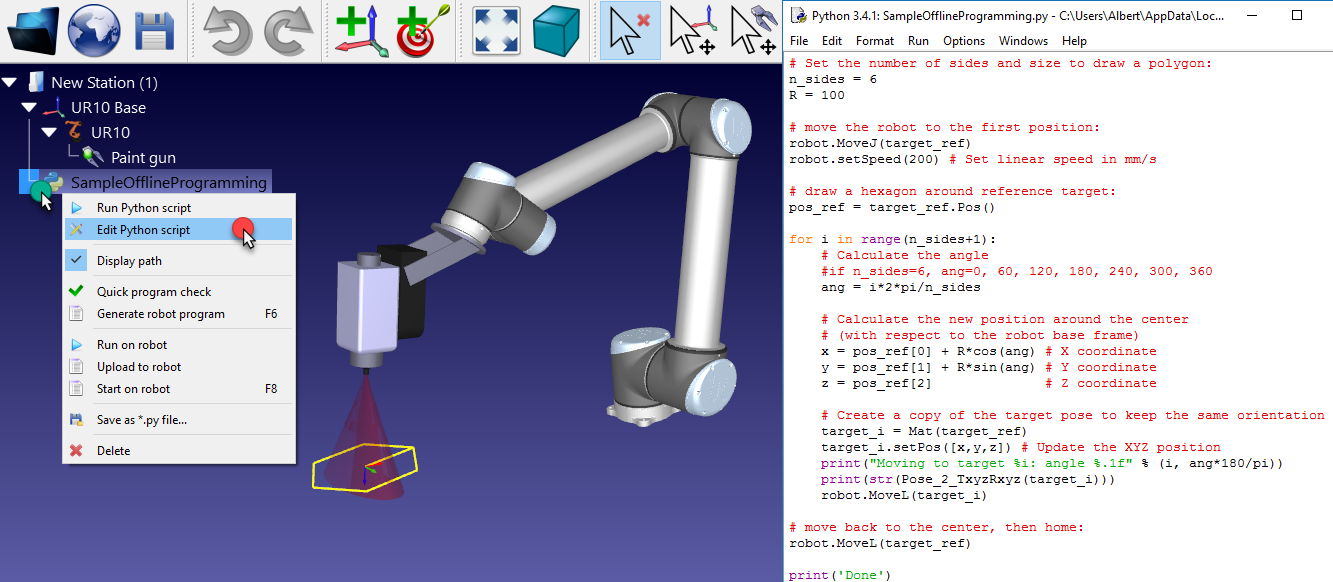
5.เปิดตัวอย่างโปรแกรม Python SampleOfflineProgramming.py จาก C:/RoboDK/Library/Macros/

6.ดับเบิ้ลคลิกไอเทมSampleOfflineProgrammingเพื่อดำเนินการจำลอง หุ่นยนต์ควรจะวาดหกเหลี่ยมรอบพื้นที่ล่าสุดของหุ่นยนต์และการติดตามTCP จะถูกแสดงผลในสีเหลือง
อีกทางเลือกหนึ่ง, คลิกขวาที่โปรแกรมและเลือก
7.คลิกขวาที่ไอเทม
SampleOfflineProgramming macro จะวาดรูปหลายเหลี่ยมของด้านn_sidesและรัศมีRจุดพื้นที่ล่าสุดของหุ่นยนต์, ซึ่งเกี่ยวข้องกับหน้าต่างอ้างอิงหุ่นยนต์, ถ้าต้องการ, ย้ายหุ่นยนต์ไปในที่ต่างกันโดยการเปลี่ยนมิติของรูปหลายเหลี่ยมและดำเนินการโปรแกรมใหม่
ตัวอย่างนี้คล้ายกับโปแกรมที่ถูกแสดงผลในส่วน offline programming ในเว็บไซต์ (รวมถึงวีดีโอ)