ภาคผนวก I – การควบคุมสำหรับแกน 1 และ 6
พวกเราจะต้องใช้ความตั้งใจพิเศษ ถ้าต้องการซ่อมแซมค่า การควบคุม/หลัก ของแกน 1 และ 6 ค่าเหล่านี้เกี่ยวข้องกันโดยตรงกับหน้าต่างฐานหุ่นยนต์สำหรับแกน 1 และการอ้างอิง TCP สำหรับแกน 6 ดังนั้น, การวัดภายนอกจะต้องนำมาอย่างเหมาะสมเพื่อตั้งค่าเหล่านี้ วินโดว์นี้ปรากฏหลังจากเราเลือก “ทำการควบคุมโปรแกรม” ในเมนูการวัดขนาด
ในสองขั้นตอนถักไปจะต้องทำตามอย่างเหมาสมเพื่อตั้งค่าการควบคุมค่าพารามิเตอร์สำหรับสองแกนเหล่านี้
การอ้างอิงแกน 6
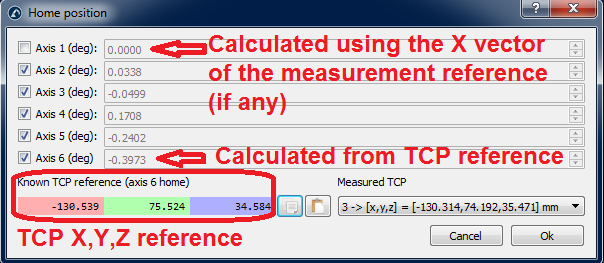
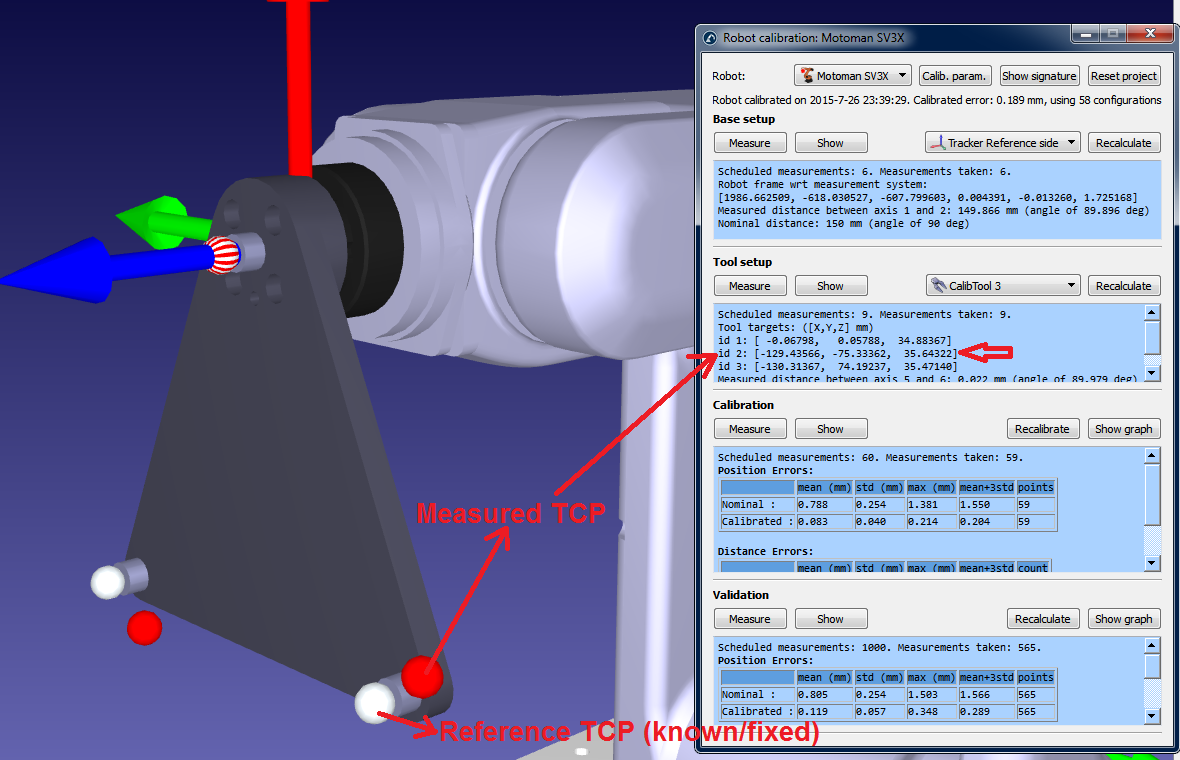
พวกเราใช้เป้าหมายการอ้างอิงเพื่อตั้งค่า “หน้าหลัก” อย่างเหมาะสม ตำแหน่งของแกน 6 มุมชดเชยจะเป็นการหมุนรอบแกน Z ของหน้าแปลนเครื่องมือซึ่งจำเป็นเพื่อทำให้พอดีที่สุด TCP ที่ถูกวัด (X,Y,Z) รู้จักกันในนาม การอ้างอิง TCP การวัด TCP (ดูได้จากรูปต่อไปนี้) เป็นหนึ่งใน TCPs ซึ่งถูกวัดในสองขั้นตอนสำหรับขั้นตอนการวัดขนาด กาอ้างอิง TCP เป็นที่รู้จักการอ้างอิงซึ่งเหมือนกับ 1 ใน TCP สำหรับเครื่องมือวัดขนาดที่ถูกใช้
จะเป็นการดี, การอ้างอิง TCP จะต้องถูกวัดโดย CMM ซึ่งเกี่ยวข้องกับหน้าแปลนเครื่องมือ (แบบจำลองของหน้าแปลนเครื่องมือหุ่นยนต์จะถูกทดสอบ) อีกทางเลือกหนึ่ง, พวกเราสามาถใช้หุ่นยนต์ใหม่เพื่อวัด (สองขั้นตอนของขั้นตอนการวัดขนาด) TCP สำหรับครั้งแรกและถูกใช้วัด TCP สำหรับการอ้างอิง มันสำคัญที่ใช้แกนหมุด และ/หรือ เครื่องมือที่เหมาะสมกับหน้าแปลนเครื่องมือซึ่งอ้างอิงเพื่อทำให้มั่นใจว่าเอฟเฟคท้ายจะถูกวาง ณ ตำแหน่งเดิม
การอ้างอิงแกน 1
พวกเราจะต้องวัด 3 เป้าหมายฐานอย่างเหมาสะสมก่อนการเริ่มต้นการวัดหุ่นยนต์ ถ้าเราต้องการทำให้แกน 1 เป็นแนวเดียวกับหน้าต่างฐานหุ่นยนต์จริง เป้าหมายฐานเหล่านี้จะต้องถูกเลือกเพื่อหน้าต่างอ้างอิงสามารถถูกหาได้ด้วยหุ่นยนต์
ตำแหน่ง “หน้าหลัก” ของแกน 1 ขึ้นอยู่กับ 3 เป้าหมายฐานโดยตรงและการตั้งค่าฐานหุ่นยนต์ การตั้งค่าฐานหุ่นยนต์เป็นขั้นตอนแรกของการวัดขนาด, ซึ่งหน้าต่างฐานของระบบการวัดจะถูกวางด้วยหน้าต่างฐานหุ่นยนต์โดยการย้ายและการวัดแกน 1 และ 2
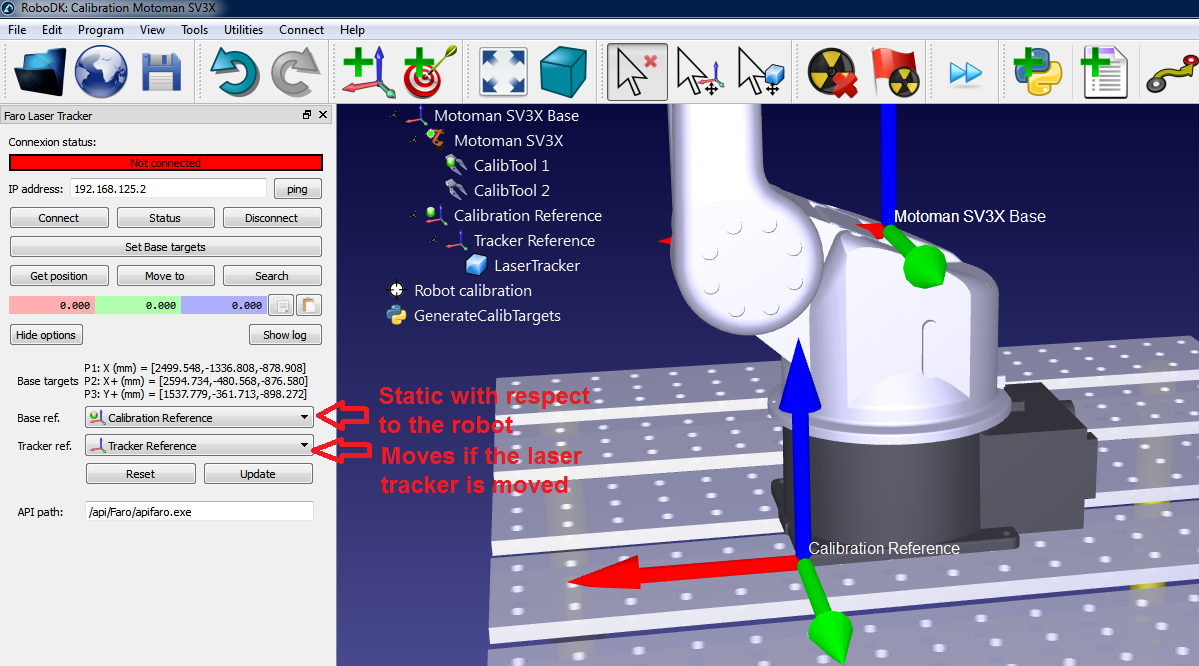
เป้าหมายฐานของระบบการวัดสามารถถูกตั้งค่าโดยการกด “ตั้งค่าฐานเป้าหมาย”(ดูในรูปถัดไป) มันมี 3 การวัดซึ่งจะกำหนดหน้าต่างอ้างอิงหุ่นยนต์ที่ต้องการ (2 การวัดแรกกำหนดแกน X และจุดที่สามสำหรับแกนบวก Y) พวกเราสามารถใช้จุดอ้างอิงที่เหมาะสมซึ่งเกี่ยวข้องกับฐานหุ่นยนต์เพื่อขั้นตอนจะได้ถูกทำซ้ำ
การแก้ไขมุมสำหรับการร่วมกัน 1 จะเป็นมุมระหว่างแกน X ของฐานอ้างอิงถูกวัดผ่าน 3 จุดและการอ้างอิงฐานซึ่งถูกวัดโดยการเคลื่อนย้ายแกน 1 และ 2 ดังนั้น, ทั้งเวกเตอร์ที่ดำเนินการก่อนหน้าที่เป็นระนาบ XY ของฐานอ้างอิงถูกได้รับโดยการสัมผัสสามจุดต้นไม้