การอ้างอิงแกน 6
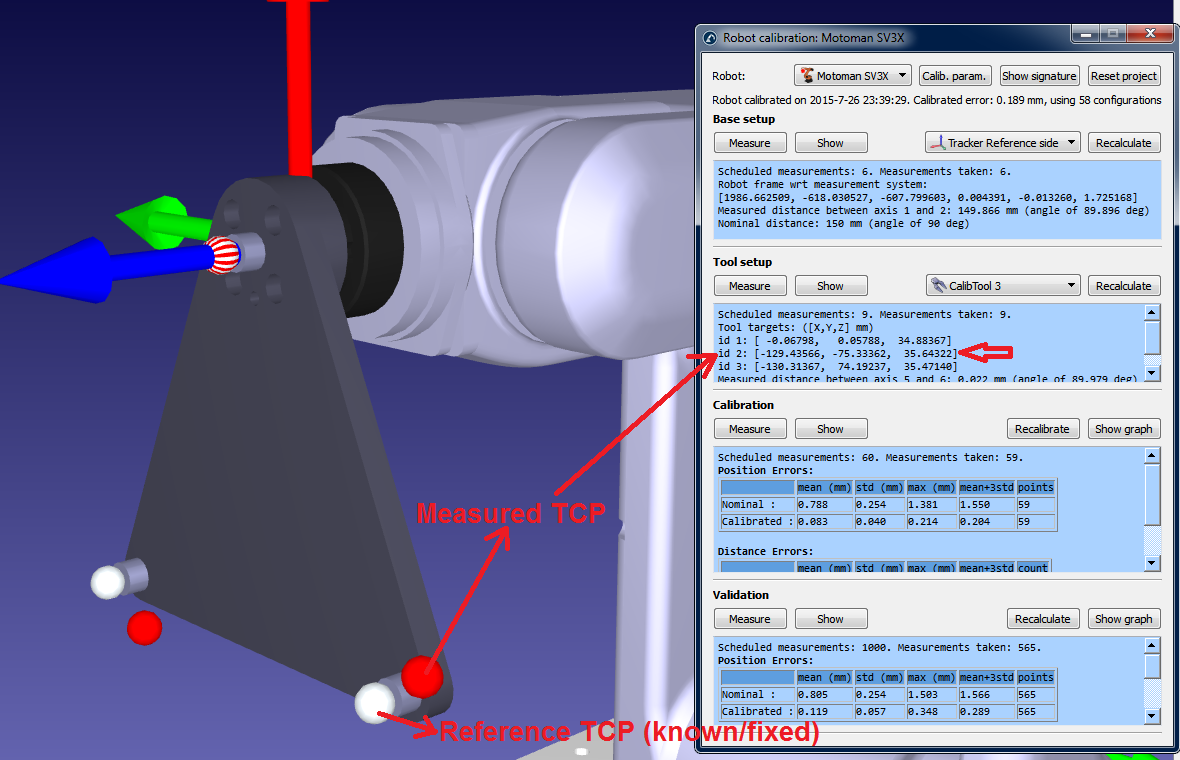
พวกเราใช้เป้าหมายการอ้างอิงเพื่อตั้งค่า “หน้าหลัก” อย่างเหมาะสม ตำแหน่งของแกน 6 มุมชดเชยจะเป็นการหมุนรอบแกน Z ของหน้าแปลนเครื่องมือซึ่งจำเป็นเพื่อทำให้พอดีที่สุด TCP ที่ถูกวัด (X,Y,Z) รู้จักกันในนาม การอ้างอิง TCP การวัด TCP (ดูได้จากรูปต่อไปนี้) เป็นหนึ่งใน TCPs ซึ่งถูกวัดในสองขั้นตอนสำหรับขั้นตอนการวัดขนาด กาอ้างอิง TCP เป็นที่รู้จักการอ้างอิงซึ่งเหมือนกับ 1 ใน TCP สำหรับเครื่องมือวัดขนาดที่ถูกใช้
จะเป็นการดี, การอ้างอิง TCP จะต้องถูกวัดโดย CMM ซึ่งเกี่ยวข้องกับหน้าแปลนเครื่องมือ (แบบจำลองของหน้าแปลนเครื่องมือหุ่นยนต์จะถูกทดสอบ) อีกทางเลือกหนึ่ง, พวกเราสามาถใช้หุ่นยนต์ใหม่เพื่อวัด (สองขั้นตอนของขั้นตอนการวัดขนาด) TCP สำหรับครั้งแรกและถูกใช้วัด TCP สำหรับการอ้างอิง มันสำคัญที่ใช้แกนหมุด และ/หรือ เครื่องมือที่เหมาะสมกับหน้าแปลนเครื่องมือซึ่งอ้างอิงเพื่อทำให้มั่นใจว่าเอฟเฟคท้ายจะถูกวาง ณ ตำแหน่งเดิม