การวัดขนาดหุ่นยนต์
การวัดขนาดหุ่นยนต์ถูกแบ่งเป็น 4 ขั้นตอน แต่ละขั้นตอนจำเป็นต้องตั้งค่าการวัด สี่ขั้นตอนนี้จะต้องเรียงตามลำดับ:
1.การวัดอ้างอิงฐาน (3 นาที).=
2.การวัดอ้างอิงเครื่องมือ (3 นาที)
3.การวัดขนาด (7 นาที, 60 การวัด)
4.การตรวจสอบการวัด (7 นาที, 60 การวัด)
ตามวีดีโอต่อไปนี้แสดงวิธีการวัดขนาด 20 นาที: https://robodk.com/robot-calibration#tab-lt. การตรวจสอบการวัด (ขั้นตอน 4) ไม่ได้จำเป็นต้องวัดขนาดหุ่นยนต์, อย่างไรก็ตาม จัดหาจุดสิ่งของมุมมองของผลลัพธ์ที่แม่นยำ อีกทั้งยังสามารถเห็นผลกระทบของการวัดขนาดหุ่นยนต์ในพื้นที่หนึ่งและการตรวจสอบในพื้นที่แตกต่างกัน
เลือกปุ่ม Measure สำหรับแต่ละ 4 วิธีการวัด เป็นการเปิดวินโดว์ใหม่ซึ่งอนุญาตให้นำการวัดใหม่และนำเข้าและส่งออกการวัดที่มีอยู่ในไฟล์อักษร (รูปแบบ csv หรือtxt )
การวัดฐาน
การวัดเหล่านี้สามารถดำเนินการที่ไหนก็ได้ในหน้าแปลนเครื่องมือถ้าพวกเราวัดเป้าหมายเดียวกันสำหรับ 6 การวัด เพื่อเริ่มการวัด, เลือกMeasureในส่วนBase setupวินโดว์ต่อไปนี้จะเปิด จากนั้น, เลือก Start Measure และหุ่นยนต์จะย้ายตามลำดับผ่านตารางการวัด
.
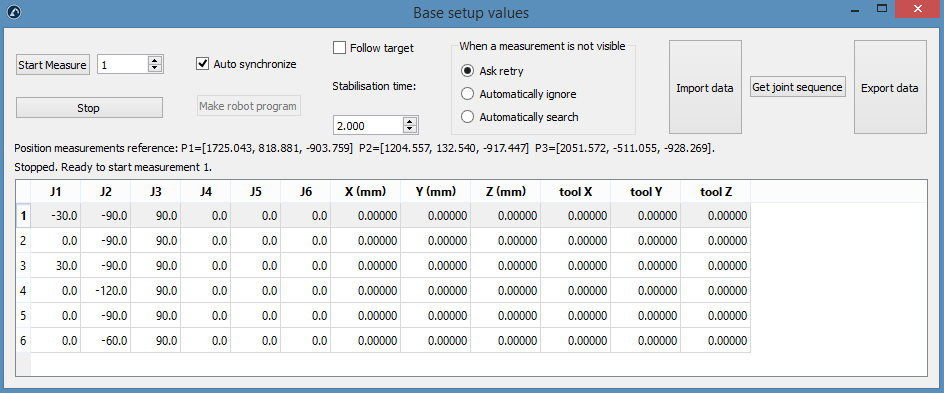
ปิดวินโดว์เมื่อการวัดได้เสร็จสิ้นแล้วและ Measurements reference หน้าต่างจะถูกอัพเดทกับหน้าต่างอ้างอิงหุ่นยนต์ ถ้าเราไม่ได้เลือกหน้าหน้าต่างอ้างอิงใด พวกเราสามารถเพิ่มแหล่งอ้างอิง (เลือกProgram➔Add Reference Frame) และวางภายใต้การอ้างอิงฐานหุ่นยนต์ (ลาก & วางในไอเทมต้นไม้)
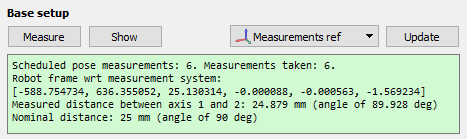
ผลรวมจะแสดงตำแหน่งและการหมุนหรือหน้าต่างอ้างอิงหุ่นยนต์กับหน้าต่างอ้างอิงการวัดขนาด (รูปแบบ [x,y,z,w,p,r], ในหน่วยมิลลิเมตรและเรเดียน)
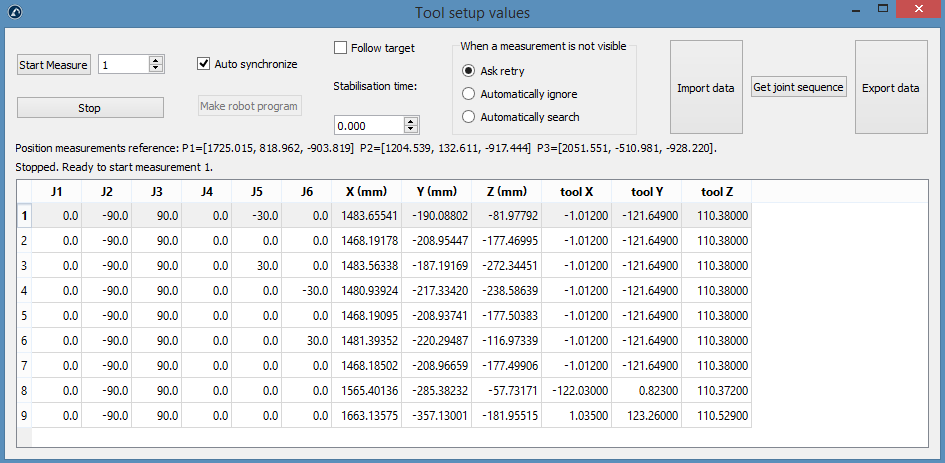
การวัดเครื่องมือ
การวัด 1-6 สามารถดำเนินอย่างไรก็ได้ในหน้าแปลนเครื่องมือยาวเท่ากับที่เราวัดเป้าหมายเดียวกันสำหรับ 6 การวัด หลังจากนั้น, ทุก TCP ซึ่งเราต้องการวัดจะเพิ่มในการวัดสำหรับ TCP เดียวกัน, ในกรณีนี้, เรามี 3TCPs ดังนั้น 6+3=9 การวัดในผลรวม เราสามารถดับเบิ้ลคลิกการวัดเพื่อกลับมาวัดจากครั้งจุดเดิมอีกครั้ง
เหมือนในส่วนก่อนหน้า : เลือกMeasureในส่วนTool setupวินโดว์ต่อไปนี้จะเปิด เลือกStart Measureและหุ่นยนต์จะย้ายตามลำดับผ่านการวัดที่วางแผนไว้แล้ว ดับเบิ้ลคลิกเพื่อกลับมาวัดจากตำแหน่งนั้นอีกครั้ง
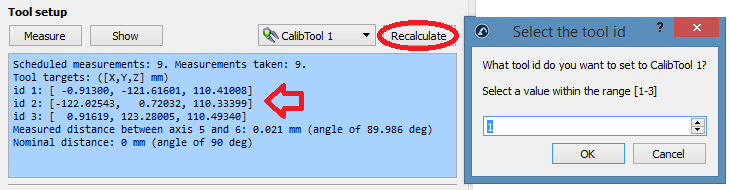
ผลรวมจะแสดงการวัดขนาด TCP เมื่อขั้นตอนได้ถูกทำให้สำเร็จแล้ว ความหมายของ TCP(ตามในรูปต่อไปนี้ “แกนหมุน”) จะถูกอัพเดทอัตโนมัติ เมื่อเราไม่ได้เลือกTCP, เราสามารถเพิ่มสิ่งหนึ่ง(เลือก “Program➔Add empty Tool”) และเลือก“คำนวณอีกครั้ง” โปรแกรมใหม่จะปรากฏขึ้นและเราจะต้องเลือก “id” ของเครื่องมือขึ้นอยู่กับคำสั่งซึ่งเรานำมาวัด พวกเราสามารถทำขั้นตอนซ้ำเพื่ออัพเดท TCPs หลายอันตามที่เราต้องการ (ในกรณีนี้มี 3 TCPs) id ของเครื่องมือจะถูกตรวจจับอัตโนมัติถ้าชื่อของเครื่องมือจบด้วยตัวเลข
การวัดขนาดหุ่นยนต์
เลือก Measure ในส่วนCalibrationวินโดว์ต่อไปนี้จะเปิดขึ้น จากนั้น,เลือกStart Measureและหุ่นยนต์จะย้ายตามลำดับผ่านการวัดที่วางแผนไว้แล้ว ดับเบิ้ลคลิกการวัดเพื่อเริ่มการวัดจากจุดเดิมอีกครั้ง
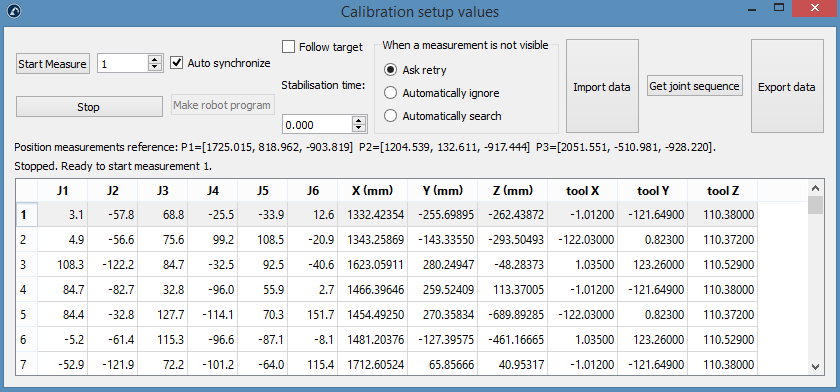
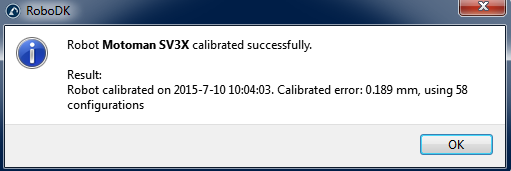
ปิดวินโดว์เมื่อการวัดสำเร็จแล้ว หุ่นยนต์จะถูกวัดขนาดอย่างอัตโนมัติและแสดงผลในข้อความดังต่อไปนี้ ถ้าไม่มีปัญหาใดๆเกิดขึ้น
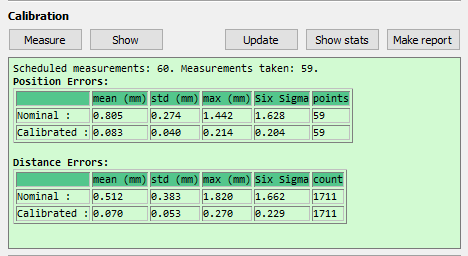
สุดท้าย, หน้าจอสีเขียวจะแสดงค่าสถิติที่เกี่ยวกับการวัดขนาดและวิธีที่ความแม่นยำถูกพัฒนาขึ้นสำหรับการวัดเหล่านั้น
การตรวจสอบหุ่นยนต์
พวกเราไม่ควรตรวจสอบความแม่นยำของหุ่นยนต์โดยการใช้การวัดเดียวกันซึ่งพวกเราวัดขนาดหุ่นยนต์ ดังนั้นมันจึงควรเป็นการวัดเพิ่มเติมเพื่อตรวจสอบความแม่นยำ(มีจุดสิ่งของมากกว่าของมุมมองผลลัพธ์ความแม่นยำ)
ขั้นตอนการวัดขนาดเดียวกันจะต้องถูกติดตามในการนำการตรวจสอบการวัด ผลรวมจะแสดงค่าสถิติตรวจสอบ, ดูข้อมูลมากกว่านี้ต่อไป Results Section