เชื่อมต่อการติดตาม
IP ของตัวติดตามจำเป็นต้องตั้งค่าการติดต่อสื่อสารอย่างเหมาะสมใน RoboDK ทำให้แน่ใจว่า VXelements ไม่ทำงานและทำตามขั้นตอนเหล่านี้เพื่อตรวจสอบการติดต่อสื่อสารด้วยตัวติดตาม:
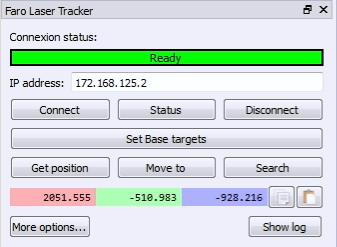
a.เลือกเมนู « Connect➔Connect laser tracker ». หน้าวินโดว์ใหม่ควรจะเปิดขึ้น
b.ตั้งค่า IP ของตัวติดตามเลเซอร์.
c.คลิกปุ่ม “Connect”
ถ้าการเชื่อมต่อเสร็จสมบูรณ์ คุณควรจะเห็นข้อความสีเขียวที่แสดงว่า “พร้อม” วินโดว์สามารถถูกปิดและการเชื่อมต่อยังคงใช้ได้ได้อยู่