สร้างเป้าหมายการวัด
มันทั้งหมด 4 วิธีในการวัดซึ่งจำเป็นต้องทำให้การวัดหุ่นยนต์สำเร็จตามที่คาดไว้:
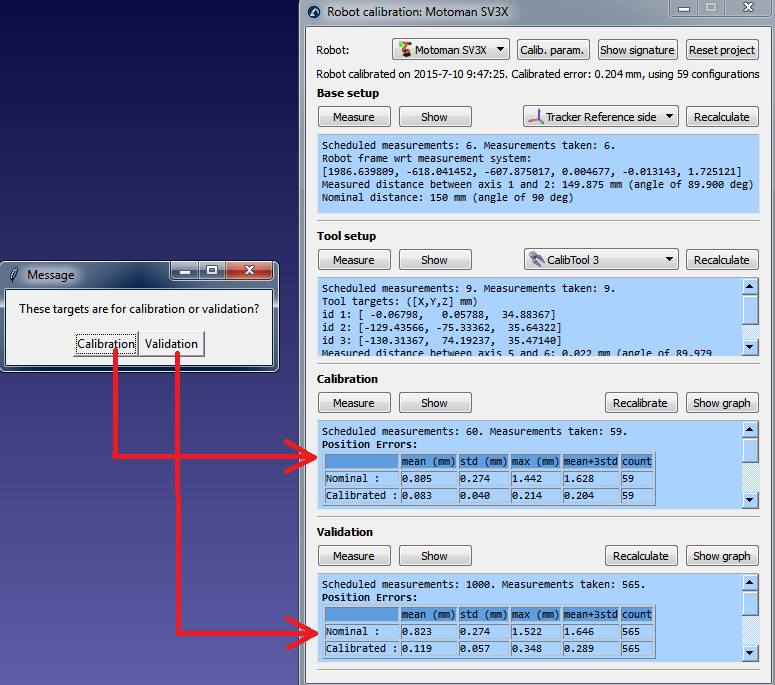
1.Base setup: หกการวัด (หรือมากกว่า) ย้ายแกน 1 และ 2 จำเป็นต้องวางการอ้างอิงการวัดด้วยหุ่นยนต์ เลือกShowในวินโดว์การตั้งค่าวัดขนาดและหุ่นยนต์จะย้ายไปตามลำดับ
2.Tool setup: 7การวัดหรือมากกว่าจำเป็นต้องวัดหน้าแปลนเครื่องมือและเป้าหมายของเครื่องมือ (ย้ายแกน 5 และ 6) เลือกShowและหุ่นยนต์จะย้ายไปตามลำดับ
3.Calibration measurements:60 การวัดหรือมากกว่าจำเป็นต้องวัดหุ่นยนต์ การวัดเหล่านี้สามารถถูกวางโดยสุ่มในพื้นที่ทำงานหุ่นยนต์และปราศจากการชนกันด้วยสิ่งของรอบๆ
4.Validation measurements (ทางเลือก): เนื่องด้วยการวัดหลายอย่างเป็นที่ต้องการใช้เพื่อตรวจสอบความแม่นยำหุ่นยนต์ การวัดเหล่านี้ใช้ได้เพียงตรวจสอบความแม่นยำของหุ่นยนต์ ไม่ใช้วัดขนาดของหุ่นยนต์
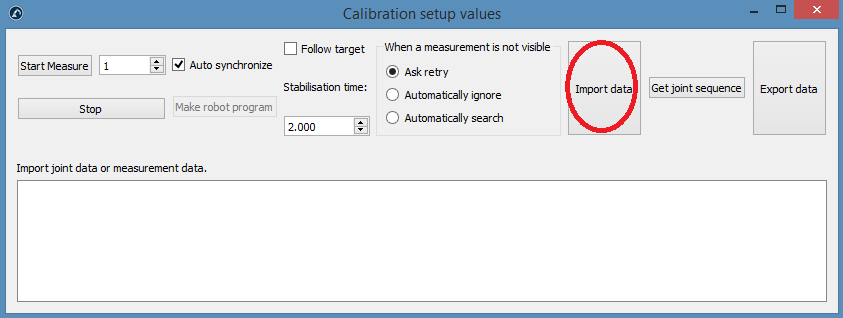
สองวิธีแรกของการวัดขนาดจะถูกสร้างขึ้นอย่างอัตโนมัติโดยRoboDK เลือก Show และหุ่นยนต์จะตามขั้นตอน (แสดงในรูปถัดไป) ถ้าลำดับจำเป็นต้องเปลี่ยน, เลือก Measure และส่งออกการวัดขนาดโดยไฟล์ CSV ซึ่งเลือกด้วย Export data ไฟล์นี้จะสามารถแก้ไขการใช้หน้า Excel และนำเข้าอีกครั้งโดยการคลิก Import data
สองวิธีวัดสุดท้าย (การวัดขนาดและการตรวจสอบ) สามารถถูกสร้างขึ้นโดยการใช้ต้นฉบับ marco ที่เรียกว่า

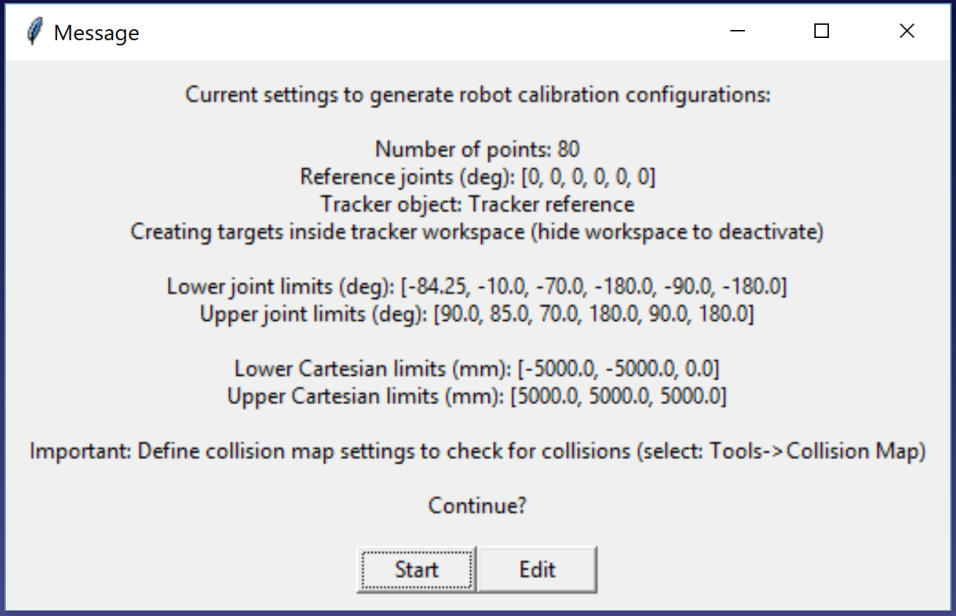
●ตัวเลขของการวัด: ตัวเลขของการวัดเพื่อสร้าง โดยเริ่มต้น,80 การวัดถูกใช้เพราะขั้นต่ำสุดที่ 60 การวัดที่ถูกเรียกว่าการวัดขนาดหุ่นยนต์
●ตำแหน่งอ้างอิง: ตำแหน่งอ้างอิงจะต้องเป็นตำแหน่งของหุ่นยนต์ซึ่งเครื่องมือที่ใช้ตรวจสอบคือเครื่องติดตามกับเป้าหมายที่เห็นได้
●ข้อจำกัดร่วมกัน: ข้อจำกัดร่วมกันข้างล่างและข้างบนจะต้องถูกจัดเตรียมไว้
●ข้อจำกัดคาร์ทีเซียน: พวกเราสามารถจัดหาข้อจำกัดคาร์ทีเซียน (ค่า X,Y,Z ) ซึ่งเกี่ยวข้องกับหน้าต่างอ้างอิงหุ่นยนต์
ต้นฉบับสร้างการวัดขึ้นอย่าง การวัดที่เครื่องใช้เครื่องติดตามและเกี่ยวกับการร่วมกันและข้อจำกัดคาร์ทีเซียน การหมุนของ +/-180 องศารอบเครื่องมือถูกอนุญาตรอบทิศทางซึ่งเจอกับเครื่องติดตาม ณ ตำแหน่งอ้างอิง ยิ่งไปกว่านั้น, ลำดับของการเคลื่อนที่ร่วมกันเป็นอิสระจากการชนกันและภายในพื้นที่การวัด (ถ้าพื้นที่ทำงานถูกตั้งค่าให้แสดงให้เห็น) รูปภาพต่อไปนี้แสดงผลรวมซึ่งแสดงผู้ใช้ก่อนการเริ่มลำดับอัตโนมัติ มันอาจจะใช้เวลาถึง 5 นาทีกว่าลำดับจะเสร็จสิ้น
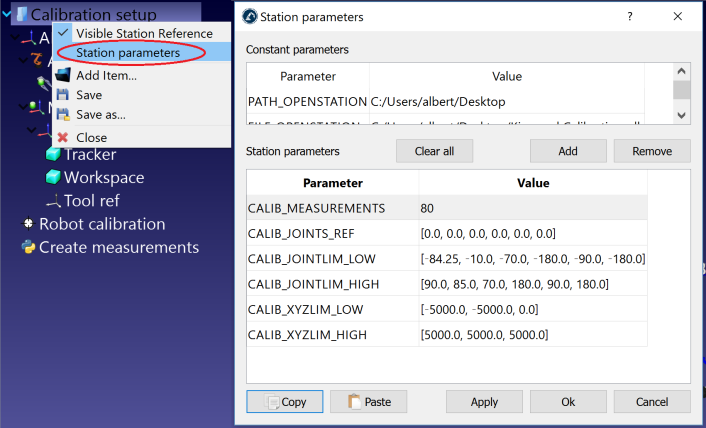
ตามที่ต้องการ, พวกเราสามารถแก้ไขต้นฉบับโดยการคลิกขวาต้นฉบับ Create measurements และเลือก Edit script, จากนั้น, ปรับเปลี่ยนพารามิเตอร์เพิ่มเติมของขั้นตอน ต้นฉบับถูกบันทึกอย่างอัตโนมัติโดยผู้ใช้ป้อนค่าฐานพารามิเตอร์ พวกเราสามารถดู, แก้ไขหรือลบการตั้งค่าเหล่านี้โดยการคลิกขวาที่ฐานและเลือก Station parameters, ตามที่แสดงในรูปถัดไป
ข้อความใหม่จะป็อปอัพขึ้นมาเมื่อขั้นตอนเสร็จเราสามารถเลือก “การวัดขนาด” 60 การวัดสำหรับการวัดขนาด พวกเราสามารถปฏิบัติใหม่ได้เหมือนต้นฉบับในการสร้างการตั้งค่าการวัดสำหรับการตรวจสอบ ขั้นตอนเป็นทางเลือกแต่ 80การวัดเป็นที่แนะนำสำหรับเพื่อการตรวจสอบ
สุดท้าย, สามารถนำเข้าการกำหนดค่าซึ่งได้ถูกเลือกจากการเลือก Import data(ภายในเมนูMeasure) พวกเราสามารถนำเข้าไฟล์ CSV หรือ TXT เป็นเมทริกซ์ Nx6, ที่ N เป็นตัวเลขของการกำหนดค่า