การควบคุมหุ่นยนต์
เมื่อหุ่นยนต์ได้ถูกวัดขนาดแล้ว, พวกเราต้องการ RoboDK เพื่อกรองโปรแกรม, ดังนั้น, ใบอนุญาต RoboDK เป็นสิ่งจำเป็น(ใบอนุญาตพื้นฐาน OLP เพียงพอสำหรับการสร้างโปรแกรมหุ่นยนต์อย่างแม่นยำเมื่อหุ่นยนต์ได้ถูกวัดขนาดแล้ว) การคัดกรองโปรแกรมหมายความว่าเป้าหมายเหล่านั้นในโปรแกรมจะถูก เลือก/เพิ่มประสิทธิภาพ เพื่อพัฒนาความแม่นยำของหุ่นยนต์, นำเข้าสู่บัญชีทั้งหมดของการวัดขนาดค่าพารามิเตอร์ (ประมาณ 30 ค่าพารามิเตอร์)
อีกทางเลือกหนึ่ง, พวกเราสามารถวัดขนาดเพียงการค่าชดเชยบวกการอ้างอิงฐานและเครื่องมือ (4 พารามิเตอร์ร่วมชดเชยบวก 6 พารามิเตอร์สำหรับพารามิเตอร์หน้าต่างฐานบวก 6 ของหน้าต่างเครื่องมือ) การวัดขนาดจะไม่แม่นยำเหมือนกับการใช้การวัดเริ่มต้นที่สมบูรณ์แต่มันจะอนุญาตให้เราเข้าถึงค่าพารามิเตอร์ในหุ่นยนต์ควบคุมและไม่ขึ้นอยู่กับ RoboDK เพื่อสร้างโปรแกรมหุ่นยนต์
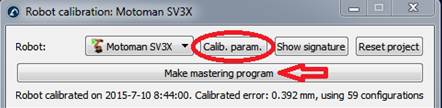
เพื่อได้รับการวัดขนาดเฉพาะสำหรับการร่วมค่าชดเชย เราจะต้องเลือกปุ่มCalib. Param, จากนั้นปุ่มMastering (ภายในเมนูการวัดขนาดหุ่นยนต์)

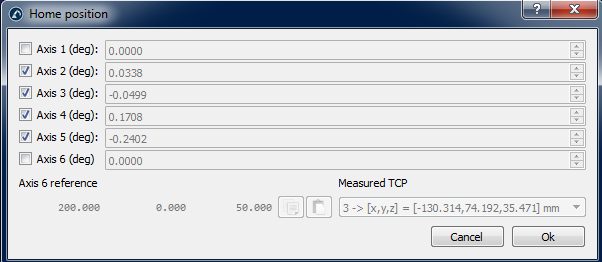
หน้าวินโดว์ใหม่จะปรากฏขึ้นหลังจากเราเลือกที่ควบคุมโปรแกรม ในต่างหน้านี้เราสามารถเลือกแกนอะไรที่เราต้องการพิจารณาตำแหน่งหน้าหลักใหม่
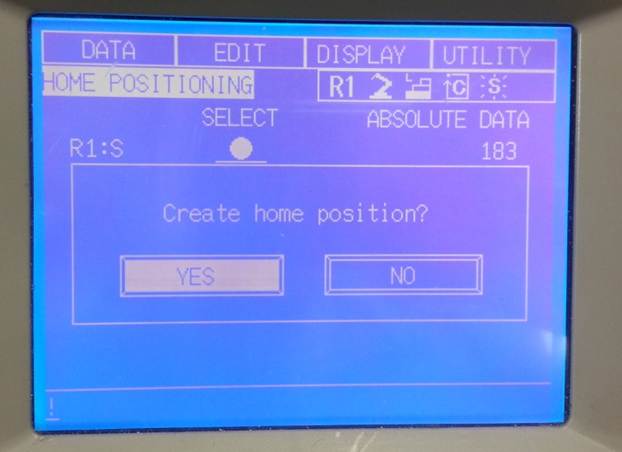
ปุ่มMake mastering programจะปรากฏขึ้นในวินโดว์การวัดขนาดหุ่นยนต์ เลือกปุ่มดังกล่าวเพื่อสร้างโปรแกรมนั้นจะเป็นการนำหุ่นยนต์ไปยังตำแหน่งหลักใหม่ เคลื่อนย้ายหุ่นยนต์และปฏิบัติการมัน, จากนั้น, ตำแหน่งหน้าหลักใหม่จะถูกบันทึก
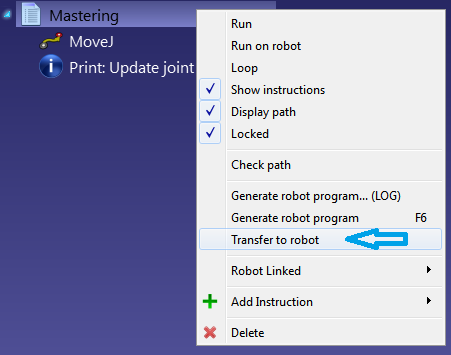
ถ้าหุ่นยนต์และคอมพิวเตอร์ PC ถูกเชื่อมต่อกันแล้ว, เราสามารถคลิกขวาที่โปรแกรมและเลือกSend Program to Robot เพื่อส่งโปรแกรมไปยังหุ่นยนต์อย่างอัตโนมัติ ในทางกลับกัน,เราสามารถเลือกGenerate robot program เพื่อจะดูการร่วมค่าสำหรับหน้าหลัก
ดังตัวอย่าง, เราต้องทำตามขั้นตอนต่อไปนี้เพื่ออัพเดทตำแหน่งหน้าหลักสำหรับหุ่นยนต์ Motoman
เราควรดำเนินโปรแกรมครั้งแรก “การควบคุม” เพื่อนำหุ่นยนต์ไปยังตำแหน่งหน้าใหม่
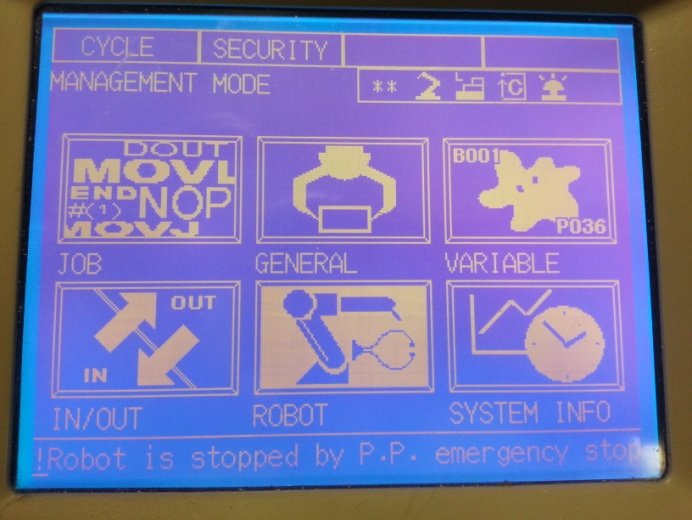
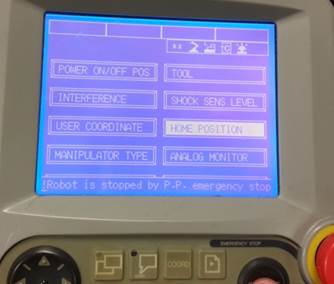
เมื่อโปรแกรมอยู่ในตัวควบคุม เราจะต้องเข้าสู่ระบบเป็น “โหมดการจัดการ” (รหัสผ่านสำหรับหุ่นยนต์ Motoman คือ 99999999) และเราจำเป็นต้องอยู่ในโหมดฝึกหัด ตามรูปดังต่อไปนี้จะแสดงขั้นตอนซึ่งถูกให้ทำตาม


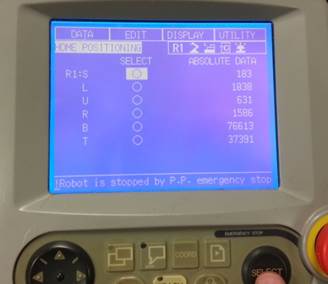
ทำให้แน่ใจว่าการอัพเดทตำแหน่งหน้าจอหลักหลักสำหรับหุ่นยนต์ร่วมกันทั้งหมด
เมื่อตำแหน่งหลักได้ถูกตั้งค่า, เราต้องลบโปรแกรมหุ่นยนต์ซึ่งนำหุ่นยนต์มาจากตำแหน่งหน้าหลัก