การอ้างอิงแกน 1
พวกเราจะต้องวัด 3 เป้าหมายฐานอย่างเหมาะสมก่อนการเริ่มต้นการวัดหุ่นยนต์ ถ้าเราต้องการทำให้แกน 1 เป็นแนวเดียวกับหน้าต่างฐานหุ่นยนต์จริง เป้าหมายฐานเหล่านี้จะต้องถูกเลือกเพื่อหน้าต่างอ้างอิงสามารถถูกหาได้ด้วยหุ่นยนต์
ตำแหน่ง “หน้าหลัก” ของแกน 1 ขึ้นอยู่กับ 3 เป้าหมายฐานโดยตรงและการตั้งค่าฐานหุ่นยนต์ การตั้งค่าฐานหุ่นยนต์เป็นขั้นตอนแรกของการวัดขนาด, ซึ่งหน้าต่างฐานของระบบการวัดจะถูกวางด้วยหน้าต่างฐานหุ่นยนต์โดยการย้ายและการวัดแกน 1 และ 2
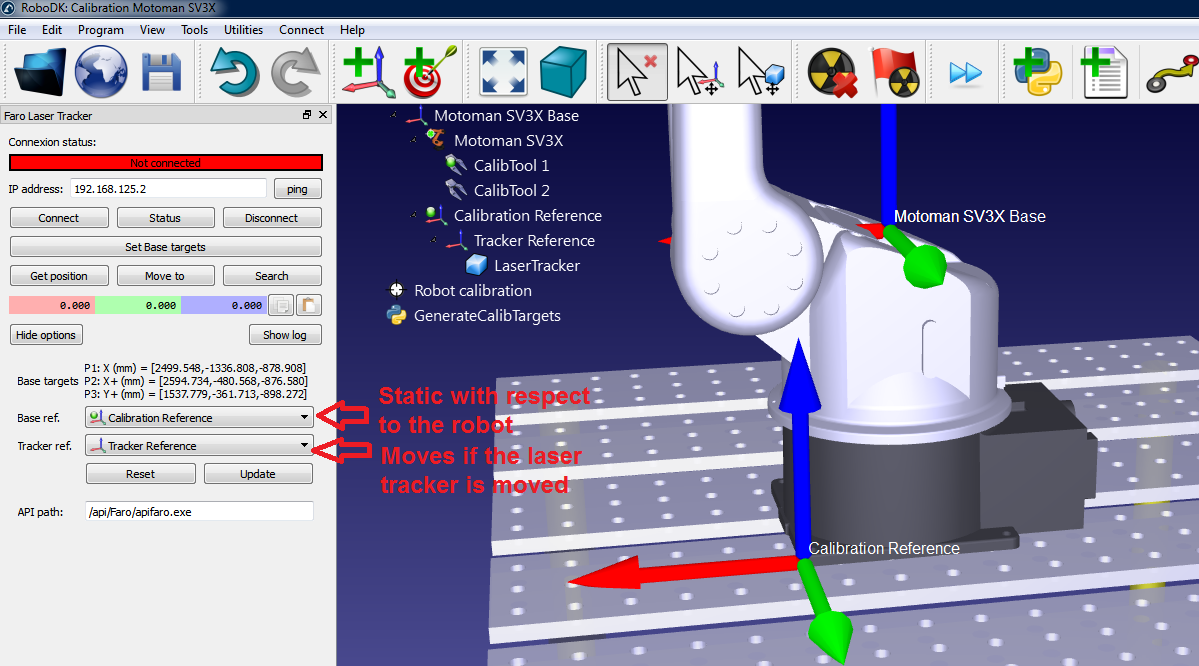
เป้าหมายฐานของระบบการวัดสามารถถูกตั้งค่าโดยการกด “ตั้งค่าฐานเป้าหมาย”(ดูในรูปถัดไป) มันมี 3 การวัดซึ่งจะกำหนดหน้าต่างอ้างอิงหุ่นยนต์ที่ต้องการ (2 การวัดแรกกำหนดแกน X และจุดที่สามสำหรับแกนบวก Y) พวกเราสามารถใช้จุดอ้างอิงที่เหมาะสมซึ่งเกี่ยวข้องกับฐานหุ่นยนต์เพื่อขั้นตอนจะได้ถูกทำซ้ำ
การแก้ไขมุมสำหรับการร่วมกัน 1 จะเป็นมุมระหว่างแกน X ของฐานอ้างอิงถูกวัดผ่าน 3 จุดและการอ้างอิงฐานซึ่งถูกวัดโดยการเคลื่อนย้ายแกน 1 และ 2 ดังนั้น, ทั้งเวกเตอร์ที่ดำเนินการก่อนหน้าที่เป็นระนาบ XY ของฐานอ้างอิงถูกได้รับโดยการสัมผัสสามจุดต้นไม้