การวัดเป้าหมายอ้างอิง
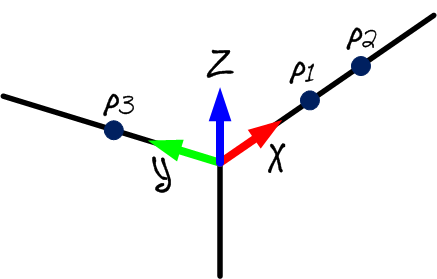
ถูกแนะนำให้วัดขนาดหน้าต่างอ้างอิง, แนบฐานหุ่นยนต์, นี้จะเป็นประโยชน์ถ้าพวกเราต้องการย้ายตัวติดตามระหว่างการวัดขนาดหรือเปรียบเทียบการวัดขนาดหุ่นยนต์สองตัว หน้าต่างอ้างอิงการวัดขนาดจะต้องถูกกำหนดโดย 3 จุดที่สัมผัสกัน
พวกเราสามารถข้ามขั้นตอนนี้ถ้าพวกเราไม่ได้ย้ายเครื่องติดตามด้วยหุ่นยนต์หรือพวกเราไม่จำเป็นต้องนำตำแหน่งหลักกลับมาจากแกน 1 ในกรณีนี้, การอ้างอิงของตัวติดตามเรเซอร์จะถูกใช้งาน
พวกเราควรทำตามขั้นตอนเหล่านี้ในทุกเวลาที่เครื่องติดตามเลเซอร์ถูกเคลื่อนย้าย:
1.เลือกConnect➔Connect laser tracker.
2.ตั้งค่า IP ของตัวติดตามเลเซอร์และเลือกเชื่อมต่อ (ถ้าเครื่องติดตามเลเซอร์ไม่ทำงาน)
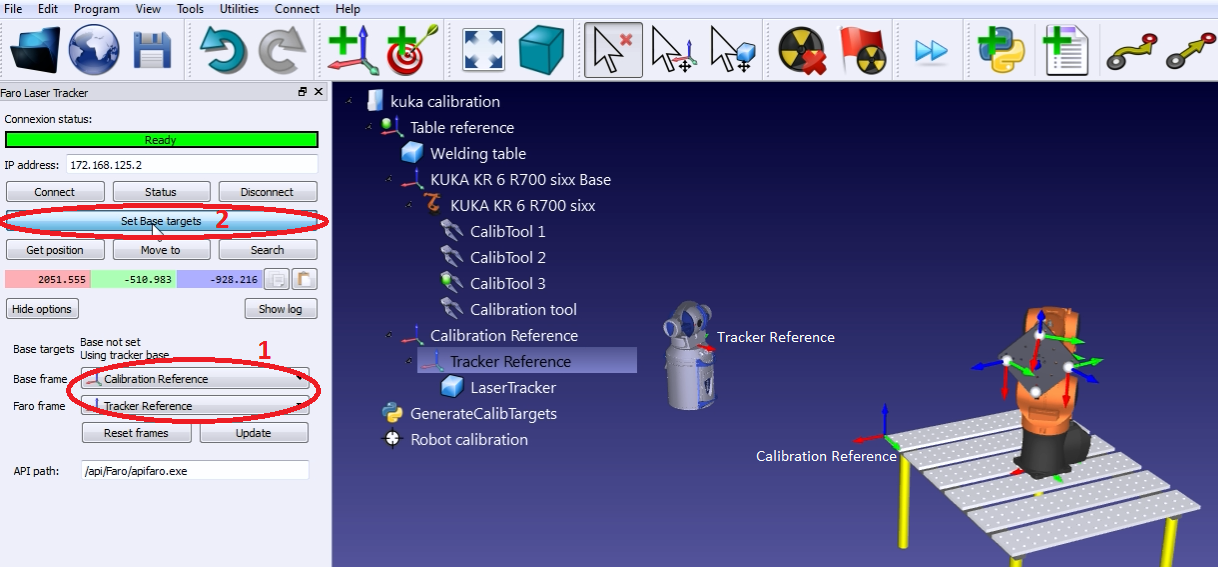
3.ตั้งค่าการอ้างอิงวัดขนาดและการอ้างอิงเครื่องติดตามที่แสดงในรูป การอ้างอิงการวัดขนาดรู้จักกันในชื่อ “Measurements reference”.
4.เลือกการตั้งค่าเป้าหมายฐาน
RoboDK จะนำทางผู้ใช้งานด้วยเมนูที่แสดงในรูปถัดไป ตำแหน่งของเครื่องติดตามเลเซอร์จะถูกอัพเดทอัตโนมัติกับการอ้างอิงการวัดขนาดเมื่อขั้นตอนได้เสร็จสิ้นแล้ว