ตั้งค่าการวัดขนาดหุ่นยนต์
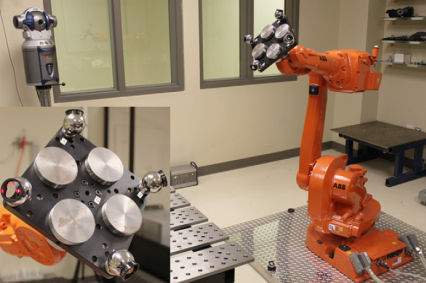
มันจำเป็นต้องเชื่อมต่อเครื่องติดตามเรเซอร์และหุ่นยนต์ที่คอมพิวเตอร์เพื่อทำให้ขั้นตอนการวัดเป็นอัตโนมัติ อีกทั้งยังสามารถวัดหน้าต่างอ้างอิงผ่านสามจุด ในกรณีที่เราเคลื่อนย้ายเครื่องติดตามเรเซอร์ (ในขั้นตอนนี้จำเป็นถ้าเราต้องการซ่อมแซมตำแหน่งหน้าหลักสำหรับแกน1, ดูข้อมูลเพิ่มเติมใน Annex II)
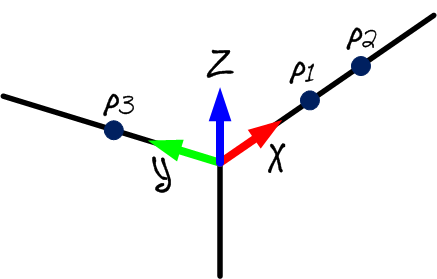
มันจำเป็นที่จะต้องแนบเป้าหมายอย่างน้อยหนึ่งSMR (สามหรือมากกว่าถ้าให้แนะนำ), ตามที่แสดงในรูปต่อไปนี้, มันยังทำให้สะดวกที่จะใช้ 3 กลุ่มเป็นหน้าต่างอ้างอิงถ้าเครื่องติดตามเรเซอร์ถูกเคลื่อนย้าย
ส่วนย่อยดังต่อไปนี้จะต้องทำให้ถูกสำเร็จเพื่อพร้อมสำหรับการเริ่มต้นการวัดขนาดอย่างเสร็จสมบูรณ์
เชื่อมต่อการติดตาม
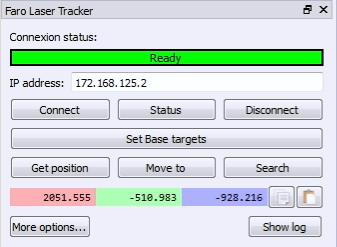
IP ของตัวติดตามจำเป็นต้องตั้งค่าการติดต่อสื่อสารอย่างเหมาะสมใน RoboDK ทำให้แน่ใจว่า VXelements ไม่ทำงานและทำตามขั้นตอนเหล่านี้เพื่อตรวจสอบการติดต่อสื่อสารด้วยตัวติดตาม:
a.เลือกเมนู « Connect➔Connect laser tracker ». หน้าวินโดว์ใหม่ควรจะเปิดขึ้น
b.ตั้งค่า IP ของตัวติดตามเลเซอร์.
c.คลิกปุ่ม “Connect”
ถ้าการเชื่อมต่อเสร็จสมบูรณ์ คุณควรจะเห็นข้อความสีเขียวที่แสดงว่า “พร้อม” วินโดว์สามารถถูกปิดและการเชื่อมต่อยังคงใช้ได้ได้อยู่
Connect to the robot
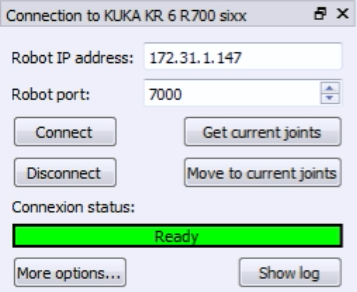
IP ของหุ่นยนต์(หรือเลขport สำหรับการเชื่อมต่อ RS232) จำเป็นต้องตั้งค่าการติดต่อสื่อสารอย่างเหมาะสมกับ RoboDK ทำตามขั้นตอนเหล่านี้เพื่อทำให้การติดต่อสื่อสารหลากหลายกับหุ่นยนต์:
1.เลือกConnect➔Connect robot. วินโดว์ใหม่จะปรากฏขึ้น
2.ตั้งค่า IP และ port ของหุ่นยนต์ (หรือport ของCOM ถ้าการเชื่อมต่อได้ถูกผ่าน RS232).
3.คลิกที่ปุ่มConnect
4.อ้างอิง appendix ถ้ามีปัญหาใดเกิดขึ้น
ถ้าคุณเชื่อมต่อเสร็จสมบูรณ์ คุณจะเห็นข้อความสีเขียวแสดงว่า Ready ตำแหน่งของหุ่นยนต์เสมือนจริงจะจับคู่อย่างถูกต้องของตำแหน่งของหุ่นยนต์จริง ถ้าเราGet current jointsอีกทางเลือกหนึ่ง, เลือกMove to current jointsเพื่อย้ายหุ่นยนต์ไปยังตำแหน่งล่าสุดเพื่อตั้งค่าการจำลอง วินโดว์สามารถถูกปิดและการเชื่อมต่อยังคงใช้งานได้
การวัดเป้าหมายอ้างอิง
ถูกแนะนำให้วัดขนาดหน้าต่างอ้างอิง, แนบฐานหุ่นยนต์, นี้จะเป็นประโยชน์ถ้าพวกเราต้องการย้ายตัวติดตามระหว่างการวัดขนาดหรือเปรียบเทียบการวัดขนาดหุ่นยนต์สองตัว หน้าต่างอ้างอิงการวัดขนาดจะต้องถูกกำหนดโดย 3 จุดที่สัมผัสกัน
พวกเราสามารถข้ามขั้นตอนนี้ถ้าพวกเราไม่ได้ย้ายเครื่องติดตามด้วยหุ่นยนต์หรือพวกเราไม่จำเป็นต้องนำตำแหน่งหลักกลับมาจากแกน 1 ในกรณีนี้, การอ้างอิงของตัวติดตามเรเซอร์จะถูกใช้งาน
พวกเราควรทำตามขั้นตอนเหล่านี้ในทุกเวลาที่เครื่องติดตามเลเซอร์ถูกเคลื่อนย้าย:
1.เลือกConnect➔Connect laser tracker.
2.ตั้งค่า IP ของตัวติดตามเลเซอร์และเลือกเชื่อมต่อ (ถ้าเครื่องติดตามเลเซอร์ไม่ทำงาน)
3.ตั้งค่าการอ้างอิงวัดขนาดและการอ้างอิงเครื่องติดตามที่แสดงในรูป การอ้างอิงการวัดขนาดรู้จักกันในชื่อ “Measurements reference”.
4.เลือกการตั้งค่าเป้าหมายฐาน
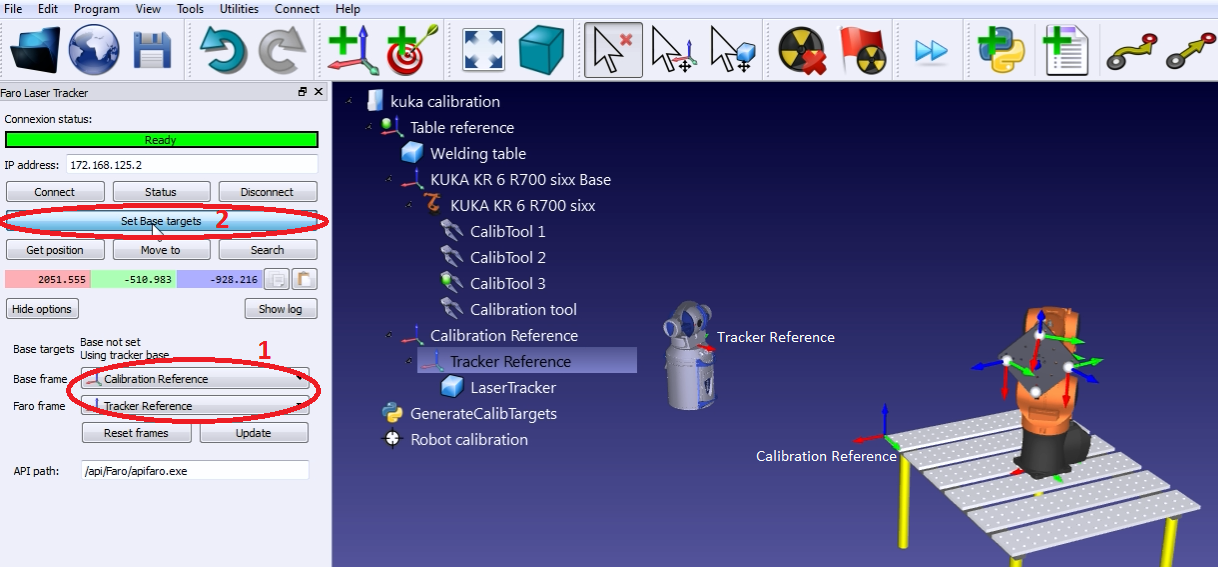
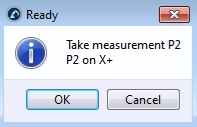
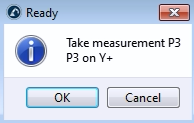
RoboDK จะนำทางผู้ใช้งานด้วยเมนูที่แสดงในรูปถัดไป ตำแหน่งของเครื่องติดตามเลเซอร์จะถูกอัพเดทอัตโนมัติกับการอ้างอิงการวัดขนาดเมื่อขั้นตอนได้เสร็จสิ้นแล้ว