ฐาน RoboDK
ฐาน RoboDK ซึ่งพื้นทีโดยรอบและข้อมูลการวัดขนาดถูกเก็บไว้ ฐานจะถูกบันทึกไว้ใน RDK ทำตามขั้นตอนต่อไปนี้เพื่อสร้างฐานหุ่นยนต์สำหรับการวัดขนาดจากร่อยรอยเดิม(ภาพรวมวีดีโอ: https://youtu.be/Nkb9uDamFb4):
1.เลือกหุ่นยนต์:
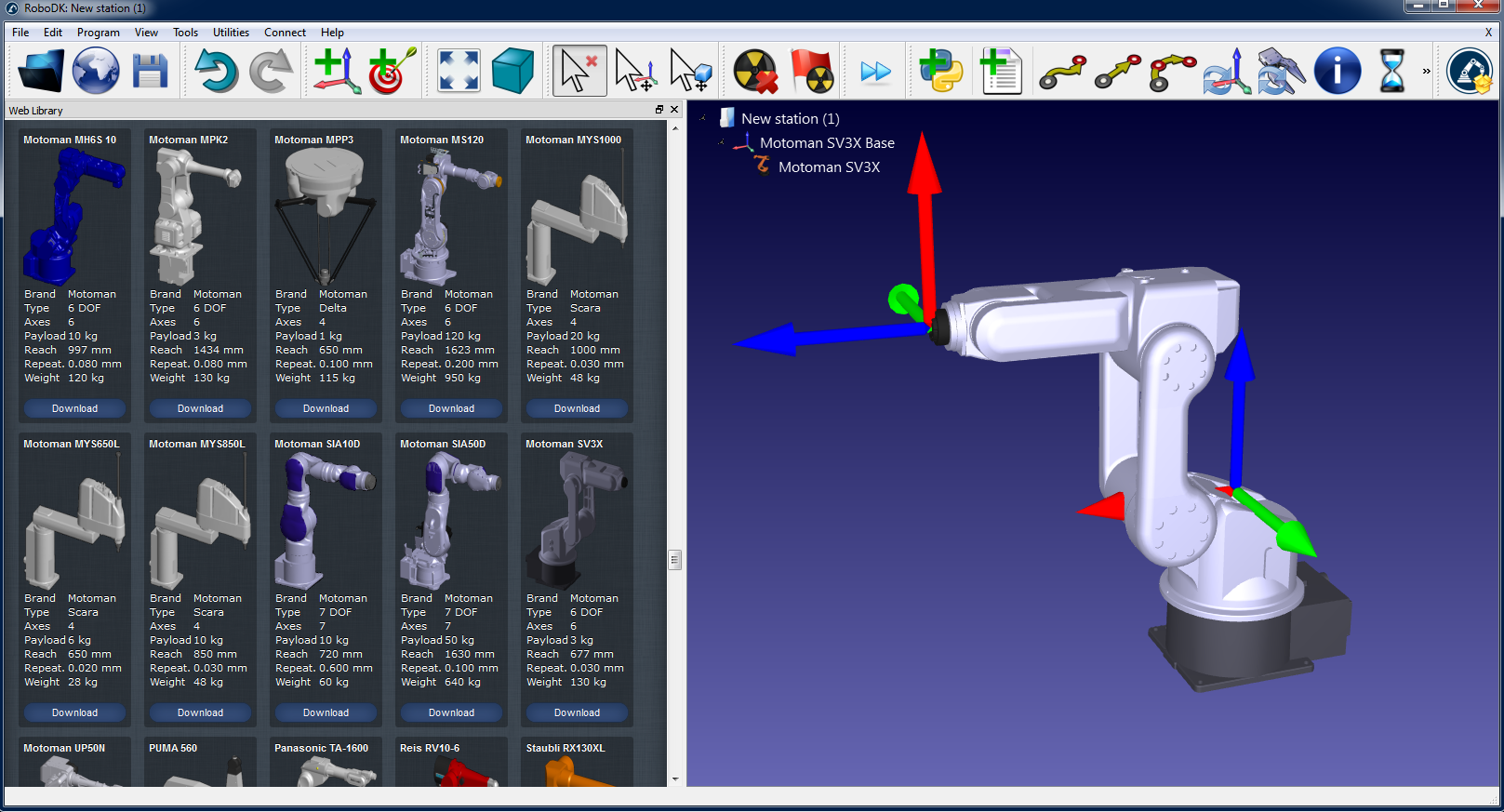
a.เลือกFile➔Open online library. คลังออนไลน์จะแสดงขึ้นใน RoboDK
b.ใช้ตัวกรองเพื่อหาหุ่นยนต์ของคุณโดยยี่ห้อ, น้ำหนักบรรทุก
c.เลือก Downloadและหุ่นยนต์ควรจะปรากฏอย่างอัตโนมัติในฐาน
d.อีกทางเลือกหนึ่ง, ดาวน์โหลดไฟล์หุ่นยนต์ (ไฟล์ส่วนขยาย.robot) โดยแยกออกจากhttps://robodk.com/library และเปิดมันด้วยRoboDK
2.โมเดลฐานเสมือนจริง
a.เพิ่มหน้าต่างอ้างอิงโดยการเลือก Program➔Add Reference Frame.
i.หนึ่ง “การอ้างอิงการวัด” หน้าต่างจะต้องถูกเพิ่มด้วยหน้าต่างฐานหุ่นยนต์
ii.หนึ่ง “การอ้างอิงตัวติดตาม” จะต้องถูกเพิ่มด้วย “การอ้างอิงการวัด” ซึ่งพวกเราพึ่งเพิ่ม
iii.หนึ่งที่เพิ่มเติม “หน้าต่างเครื่องมือ” สามารถถูกเพิ่มด้วย “การอ้างอิงการวัด” หน้าต่างเพื่อทำให้เสมือนจริงกับตำแหน่งของเครื่องมือที่เห็นด้วยตัวติดตาม
Tip 1: ลากและปล่อยไอเทมในฐานต้นไม้เพื่อสร้างใหม่ส่วนที่เกี่ยวข้องกันในความเป็นจริง ดังตัวอย่าง, การอ้างอิงตัวติดตามจะต้องถูกวางด้วย “การอ้างอิงการวัด”.
Tip 2: คุณสามารถย้ายหน้าต่างอ้างอิงโดยประมาณหรือหน้าต่างเครื่องมือโดยการกด ALT ค้างและกด SHIFT+ALT ตามลำดับ อีกทางเลือกหนึ่ง, คุณสามารถดับเบิ้ลคลิกหน้าต่างอ้างอิงและนำเข้าพิกัดที่ถูกต้อง
Tip 3: เปลี่ยนชื่อสิ่งของโดยใช้ปุ่ม F2 บนไอเทมต้นไม้
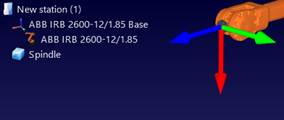
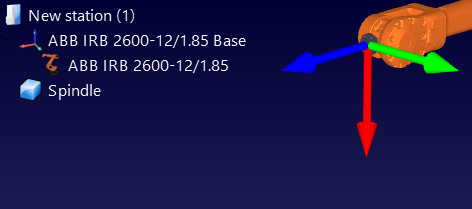
b.เพิ่มเครื่องมือ (รูปแบบไฟล์ที่สนับสนุนSTL, IGES และ STEP) และลากและปล่อยลงในหุ่นยนต์ (ภายในไอเทมต้นไม้), จะเป็นการแปลงสิ่งของเป็นเครื่องมือ ข้อมูลเพิ่มเติมดูได้จาก here
ทางเลือก : เลือก Program➔Add empty toolเพื่อเพิ่ม TCP’s ซึ่งเราต้องการทำให้เสมือนจริงในฐาน (เพื่อตรวจสอบการชนกันหรืออย่างอื่น) เพื่อตั้งค่าค่าที่เหมาะสมชองTCP:
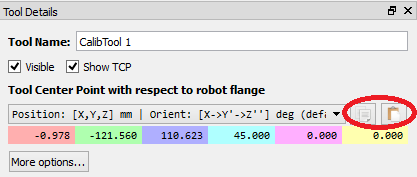
i.ดับเบิ้ลคลิกเครื่องมือใหม่
ii.ตั้งค่าประมาณของ TCP คุณสามารถ คัดลอก/วาง 6ค่า ณ การใช้สองปุ่มที่ด้านขวา
iii.อีกทั้งยังสามารถเปลี่ยนชื่อ TCPs ที่ใช้ในการวัดด้วยชื่อ “CalibTool id”, ซึ่ง id เป็นตัวเลขเป้าหมายการวัดขนาด
a.เพิ่มไฟล์3D CAD(STL, IGES, STEP, SLD, ...) ไปยังโมเดลเสมือนจริงโดยการใช้เมนูFile➔Open…อีกทางเลือกหนึ่ง, ลากและปล่อยไฟล์ของ RoboDK ไปยังวินโดว์หลัก
b.Tip 1: นำเข้าไฟล์ 3 มิติของพื้นที่ทำงานการวัดและตั้งชื่อพื้นที่เพื่อการวัดหุ่นยนต์จะถูกสร้างขึ้นภายในพื้นที่ทำงานของตัวติดตาม อีกทางเลือกหนึ่ง, ตั้งค่าพื้นที่ทำงานที่ไม่เห็น ถ้าเราไม่ต้องการจำกัดการวัดภายในพื้นที่ตัวติดตาม ข้อมูลเพิ่มเติมดูได้ในส่วนถัดไป
c.Tip 2: อีกทั้งยังสามารถเลือก CTRL+ALT+Shift+P เพื่อปิดกันการนำเข้าไฟล์ลับ 3มิติ ซึ่งได้ถูกนำเข้าใน RoboDK
3.เพิ่มโมดูลการวัดในฐาน:
a.เลือกเมนูUtilities➔Robot Calibration.
b.เลือกLaser tracker.
จากนั้น, วินโดว์ต่อไปนี้จะปรากฏขึ้น
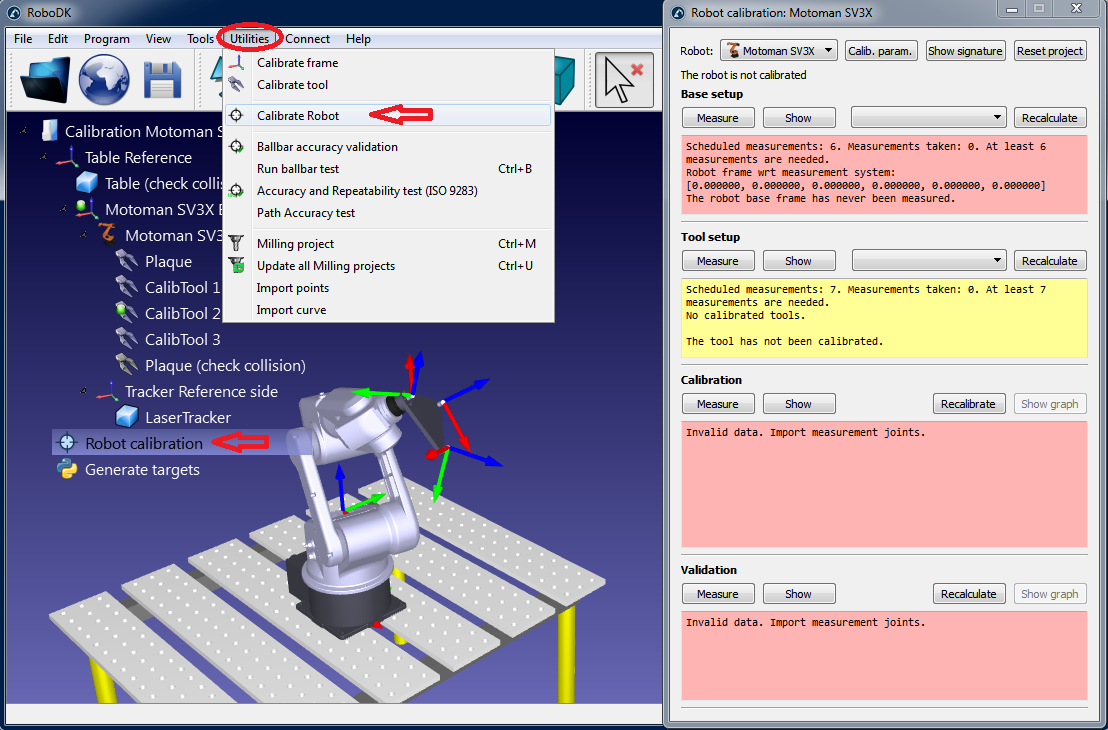
วินโดว์สามารถถูกปิดได้ในตอนนี้ พวกเราสามารถเปิดเมื่อไรก็ได้โดยการดับเบิ้ลคลิกฐานไอเทม Robot calibration

4.บันทึกฐาน
a.เลือกFile➔Save station.
b.จัดหาโฟลเดอร์และตั้งชื่อไฟล์
c.เลือกบันทึก ไฟล์RDK ใหม่จะถูกสร้างขึ้น (ฐานไฟล์RoboDK)
พวกเราสามารถกู้การฐานการดัดแปลงเมื่อไรก็ได้โดยการเปิดไฟล์ RDK(ดับเบิ้ลคลิกไฟล์บนวินโดว์)
โดยสรุป, มันสำคัญที่ดับเบิ้ลตรวจสอบจุดดังต่อไปนี้:
เครื่องมือการวัดขนาดถูกตั้งชื่อว่า “CalibTool id” และ id เป็นเลขเริ่มต้นโดย 1 (ถ้ามีเครื่องวัดขนาดมากกว่า 3 เครื่องมือ เราจะต้องมี “CalibTool 1”, “CalibTool 2” and “CalibTool 3”.
1. Measurements reference หน้าต่างโดยตรงขึ้นอยู่กับฐานหุ่นยนต์
สำหรับตอนนี้, พวกเราสามารถใช้ค่าประมาณของหน้าต่างอ้างอิง (ค่าประมาณ)
2.Tracker referenceถูกแนบโดยตรงกับMeasurements reference. การอ้างอิงตัวติดตามจะต้องมีตำแหน่งประมาณของไดร์เวอร์การวัดตัวตัวติดตามซึ่งเกี่ยวกับการอ้างอิงตัววัด
3.โครงการ “Robot calibration” เป็นการแสดงในฐานและการวัดทั้งหมดซึ่งพวกเรากำลังวางแผนที่จะทำให้ปลอดภัยจากการชนกันและสามารถเห็นได้ด้วยตัวติดตาม (ดับเบิ้ลคลิกที่การตั้งค่าการวัดและเลือกแสดงสำหรับแต่ละกลุ่มของสี่กลุ่มของการวัด)
4.ถ้าพวกเราต้องการตรวจสอบอัตโนมัติสำหรับการชนกัน พวกเราจะต้องใช้ติดป้าย“collision” ในทุกๆสิ่งของซึ่งเราต้องการตรวจสอบการชนกัน อีกทั้งยังสามารถใช้เครื่องมือประมาณ 25% ที่ใหญ่กว่าเครื่องมือกาวัดเพื่อความปลอดภัยและปราศจากการชนกัน