ภาคผนวก II – ทดลองเครื่องติดตามเลเซอร์ Faro
การวัดขนาดหุ่นยนต์จำเป็นต้องวัดจากหุ่นยนต์ด้วยระบบการวัด เพื่อนำการวัดเหล่านี้จำเป็นต้องใช้เครื่องติดตามเลเซอร์ Faro ซึ่งติดต่อกับคอมพิวเตอร์ การติดต่อสื่อสารถูกทำให้สำเร็จผ่านไดร์เวอร์ไฟล์ exe ซึ่งสามารถทำให้ดำเนินการในโหมดคอนโซล
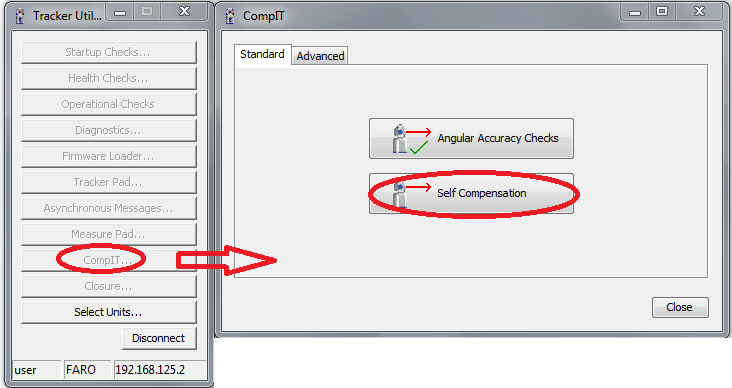
ดังตัวอย่าง.Faro มีแอพพลิเคชั่นฟรีที่เรียกว่า “Tracker Utilities” แอพพลิเคชั่นนี้สามารถเริ่มต้นเครื่องติดตามเลเซอร์และแสดงการตรวจสอบสุขภาพ, ท่ามกลางสิ่งของ
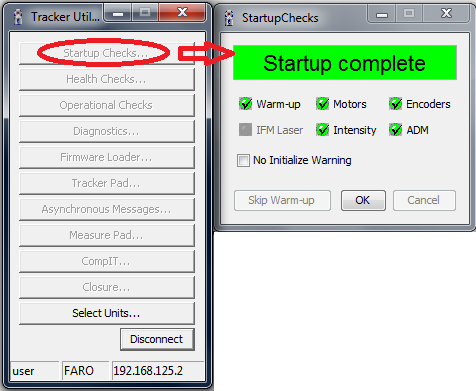
เพื่อเริ่มต้นเครื่องติดตาม พวกเราควรเริ่มแอพพลิเคชั่น “Tracker Utilities”, เชื่อมต่อการใช้เครื่องติดตาม IP, จากนั้น, เลือก “Startup Checks”. เมื่อเครื่องติดตามได้เริ่มต้น, เราควรวางเป้าหมาย initialize 1.5’’ ในหน้าตำแหน่ง “home” ก่อนการเริ่มต้น. มิฉะนั้น, สีเขียวอ่อนจะเกิดขึ้นหลังจากการเริ่มต้นและการวัดจะไม่ถูกตรวจสอบ
เมื่อการเริ่มต้นได้ทำเสร็จแล้ว พวกเราควรอ่าน “Startup complete” ข้อความ , ซึ่งถูกแสดงในรูปดังกล่าว

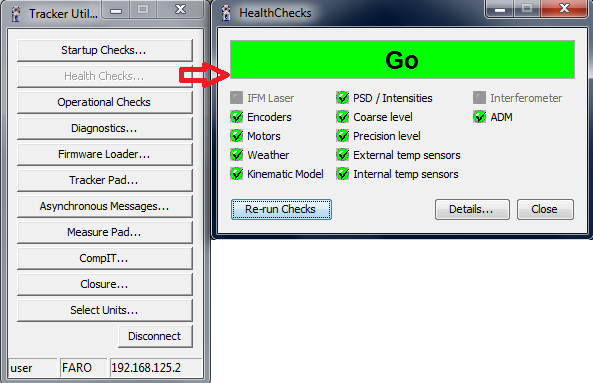
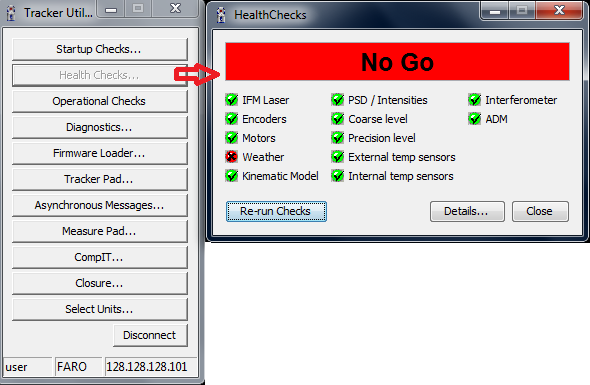
ถ้าคุณมีประสบการณ์เกี่ยวกับปัญหาเครื่องติดตาม, คุณสามารถดำเนินการตรวจสอบโดยการใช้ “Health Checks…” ในสองรูปต่อไปแสดงการตรวจสอบที่เสร็จสมบูรณ์และการตรวจสอบที่ผิดพลาดตามลำดับ บางครั้ง, ปัญหาได้ถูกแก้ไขหลังจากเชื่อมต่อสายและรีบูทเครื่องติดตามเลเซอร์ใหม่อีกครั้ง
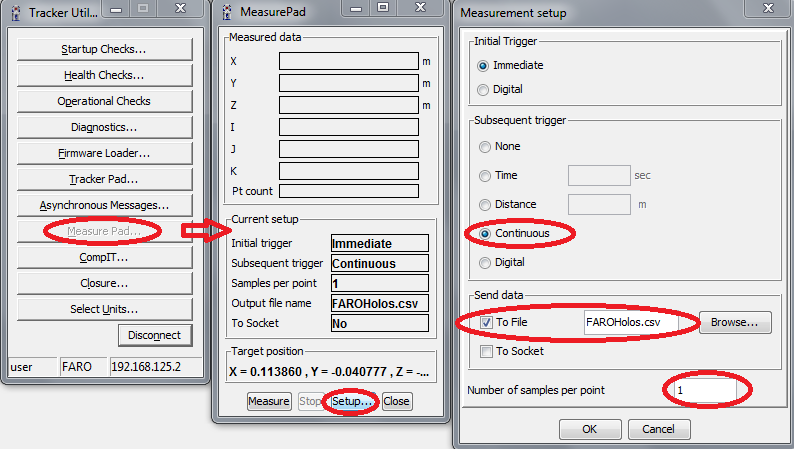
สุดท้าย, เราสามารถใช้“Measure pad” เพ่อนำการวัดบางอย่างเครื่องติดตามเลเซอร์สามารถติดตามเป้าหมายและวัดตำแหน่ง XYZ ณ อัตรา 1000 เฮิร์ตซ์ ถ้าเราตั้งค่าตัวอย่าง 1 ต่อจุดและกระตุ้นอย่างต่อเนื่อง เครื่องติดตามจะบันทึก 1000 การวัดต่อวินาทีในไฟล์
พวกเราสามารถใช้ลักษณะนี้ในการวัดเส้นทางหุ่นยนต์และใช้การตรวจสอบเส้นทางความแม่นยำของ RoboDK, ความเร็วและความเร่งระหว่างเส้นทาง