ปรับแต่งไดร์เวอร์หุ่นยนต์
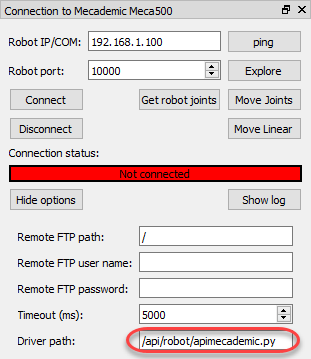
ไดร์เวอร์หุ่นยนต์อยู่ตั้งอยู่ในโฟลเดอร์ /RoboDK/api/Robot/ โดยค่าเริ่มต้น RoboDK เชื่อมต่อกับไดร์เวอร์เฉพาะในการตั้งค่าเชื่อมต่อหุ่นยนต์:
1.คลิกขวาที่หุ่นยนต์
2.เลือก
3.เลือกMore options…
4.ตั้งหรือป้อนเส้นทางของไดร์เวอร์ในส่วนของDriver path
ไดร์เวอร์หุ่นยนต์หนึ่งเป็นแอพพลิเคชั่นคอนโซลแบบสแตนด์อโลน ไดร์เวอร์หุ่นยนต์สามารถถูกพัฒนาโดยการใช้ฐานการเขียนโปรแกรมใดๆ, ดังตัวอย่าง, สามารถเป็นโมดูล Python(รูปแบบ PY) หรือโปรแกรมปฏิบัติการที่ถูกสร้างด้วย IDE
ไดร์เวอร์หุ่นยนต์อนุญาตให้การสื่อสารด้วยหุ่นยนต์ผ่านเส้นคำสั่ง คำสั่งเดียวกันซึ่งสามารถถูกปฏิบัติด้วยตนเองด้วยการใช้ RoboDK เพื่อขับเคลื่อนหุ่นยนต์จาก PC หุ่นยนต์แต่ละตัวสามารถถูกจับเคลื่อนในโหมดคอนโซลเพื่อทดสอบ
ตัวอย่างไดร์เวอร์ Python (apimecademic.py) ด้วยแหล่งโค้ดเพื่อควบคุมหุ่นยนต์ Mecademic สามารถใช้งานได้ใน C:/RoboDK/bin/robot/
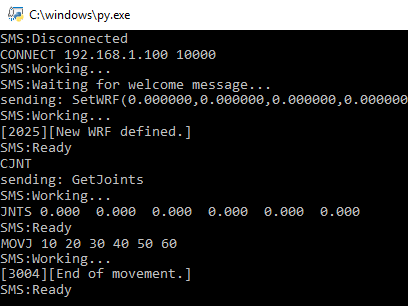
ดับเบิ้ลคลิกไฟล์ apimecademic.py เพื่อดำเนินการในโหมดคอนโซล(Python จะต้องถูกติดตั้ง) ไดร์เวอร์จะรอสำหรับคำสั่งใหม่ยกตัวอย่างเช่น, เราสามารถแบ่งประเภทของคำสั่งต่อไปนี้เพื่อเชื่อมต่อหุ่นยนต์ซึ่งมีIP และการติดต่อสื่อสาร port:
CONNECT 192.168.100.1 10000
ถ้าการเชื่อมต่อสำเร็จ เราสามารถเห็นข้อความSMS:Readyจากนั้น, พวกเราสามารถแบ่งประเภทของคำสั่งเพื่อนำเอาจุดร่วมหุ่นยนต์กลับคืนมา:
CJNT
พวกเรายังสามารถแบ่งประเภทของคำสั่งเช่น MOVJ, MOVL หรือ SETTOOL เพื่อเคลื่อนย้ายหุ่นยนต์หรืออัพเดทTCP:
MOVJ 10 20 30 40 50 60
การสนับสนุนหุ่นยนต์ซึ่งแสดงผลตำแหน่งร่วมในเวลาเดียวกัน ในกรณีเป็นไปได้ที่จะหาข้อเสนอแนะตำแหน่งร่วมกันเหมือนหุ่นยนต์เคลื่อนย้ายโดยการส่ง JNTS_MOVING เมื่อไดร์เวอร์ถูกทำงานโดย RoboDK, หุ่นยนต์เสมือนจริงจะตามการเคลื่อนที่ของหุ่นยนต์จริงในเวลาจริง คำสั่งใหม่จะไม่ถูกดำเนินการจนกระทั่งข้อความพร้อมได้ถูกส่งออกไป
ปฏิสัมพันธ์ระหว่างคอนโซลและการเชื่อมต่อกับหุ่นยนต์ถูกจัดการโดยโมดูล Python หนึ่งสำหรับไดร์เวอร์ Mecademic ปฏิสัมพันธ์ระหว่างคอนโซลควรจะเหมือนกับหุ่นยนต์ทุกตัว,ตามที่อธิบายในส่วนนี้แต่อย่างไรก็ตาม, ปฏิสัมพันธ์ของหุ่นยนต์แต่ละตัวขึ้นอยู่กับผู้ผลิตหุ่นยนต์, ในกรณีนี้เราอ้างอิงถึง Meca 500 programming manual เพื่อส่งคำสั่งที่เหมาะสมในการย้ายและแสดงผลหุ่นยนต์Meca 500