การเคลื่อนที่เส้นตรง
เลือกProgram➔
เว้นแต่เป้าหมายถูกเลือกก่อนการเพิ่มคำแนะนำ, คำแนะนำการเคลื่อนที่จะสร้างเป้าหมายใหม่และจะถูกเชื่อมต่อ ถ้าเป้าหมายถูกย้ายและการเคลื่อนที่ถูกดัดแปลง
Joint Moves และ Linear Moves แสดงในรูปแบบเดียวกันและสามารถสลับจากชนิดหนึ่งไปอีกชนิดหนึ่ง
เหมือนกับคำแนะนำ Joint Move, ถ้าเป็นคำสั่งแรกซึ่งถูกเพิ่มในโปรแกรม, มากกว่าสองคำแนะนำจะถูกเพิ่มก่อนคำแนะนำการเคลื่อนที่:Reference Frame selection และ Tool Frame selection.
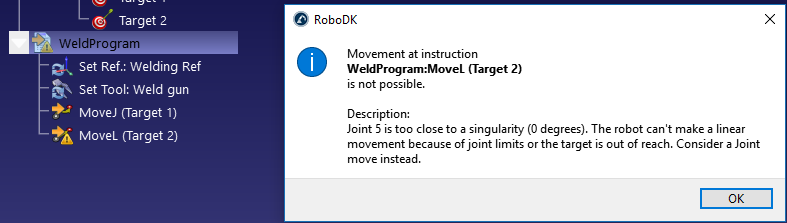
ตรงกันข้ามกับ Joint Move, การเคลื่อนที่เส้นตรงเหมาะสมสำหรับหุ่นยนต์ลักษณะเฉพาะและการจำกัดแกน ดังตัวอย่าง, หุ่นยนต์ 6แกน ไม่สามารถข้ามความเฉพาะโดยการเคลื่อนที่เส้นตรง ตามรูปดังต่อไปนี้ที่แสดงในตัวอย่างโดยกล่าวว่า Joint5 ใกล้เกินไปที่เป็นความเฉพาะตัว(0 องศา) […] พิจารณาJointแทน ตามที่แสดงในรูปดังต่อไปนี้
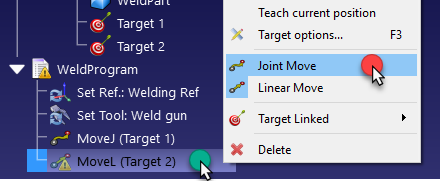
ถ้าการเคลื่อนที่เส้นตรงไม่ได้จำเป็นต่อการบังคับ, คลิกขวาที่คำแนะนำเคลื่อนที่และเปลี่ยนคำสั่งJoint
อีกทางเลือกหนึ่ง, เป้าหมาย,TCP หรือตำแหน่งของหน้าต่างอ้างอิงจะต้องถูกกำหนดเพื่อหลีกเลี่ยงลักษณะเฉพาะตัว
เลือกProgram➔
หน้าต่างอ้างอิงเป็นตัวแปรที่รู้จักกันในชื่อ Work Object (หุ่นยนต์ ABB), UFRAME (หุ่นยนต์ Fanuc), FRAME (สำหรับหุ่นยนต์ Motoman) oหรือ $BASE (สำหรับหุ่นยนต์ KUKA)