เหตุการณ์จำลอง
เลือกProgram➔
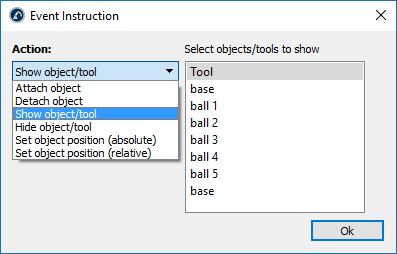
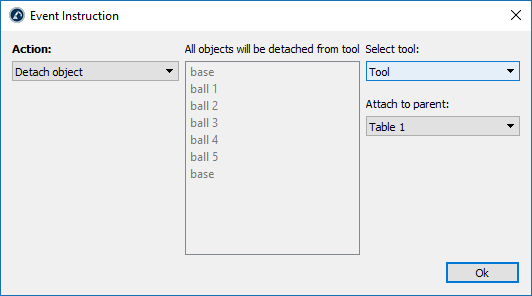
●การแนบหรือการถอดสิ่งของจากเครื่องมือหุ่นยนต์
●การแสดงหรือซ่อนสิ่งของหรือเครื่องมือ
●การเปลี่ยนตำแหน่งของสิ่งของและตำแหน่งอ้างอิง
ดังตัวอย่าง, ถ้าหุ่นยนต์ทำการย้ายตำแหน่งเฉพาะเพื่อคว้าจับสิ่งของ เราสามารถตั้งค่าเหตุการณ์Attach objectเพื่อย้ายสิ่งของด้วยกับจากนั้น, หลังจากหุ่นยนต์ไม่มีการเคลื่อนย้ายและมันพร้อมที่จะทิ้งสิ่งของ เราสามารถตั้งค่าเหตุการณ์ Detach objectเพื่อทิ้งสิ่งของเครื่องมือที่ถูกคว้าจับ
Note:เหตุการณ์เฉพาะสามารถูกจำลองโดยการใช้ macros (ประสบการณ์การเขียนโปรแกรมจำเป็นต้องมี) ดังตัวอย่าง, การใช้ API เป็นไปได้ที่จะทำวัตถุให้ปรากฏขึ้นโดยการลุ่ม ณ พื้นที่เฉพาะสำหรับการหยิบและวางการจำลอง
Note:เมื่อแนบวัตถุในเครื่องมือ, วัตถุที่ใกล้ที่สุดถูกแนบถ้าไม่มีที่ไกลกว่าจากระยะทางที่ให้ ระยะทางเป็น 200 มิลลิเมตรโดยเริ่มต้นและสามารถถูกเปลี่ยน: Tools➔Options➔Maximum distance to attach an object to a robot toolอีกทั้ง, โดยเริ่มต้น, ระยะทางถูกตรวจสอบจากสถานที่ TCP เพื่ออ้างอิงวัตถุอีกทางเลือกหนึ่ง, ยังสามารถใช้ระยะทางระหว่าง TCP และวัตถุเรขาคณิตโดยการเลือก ตรวจสอบระยะทางสั้นที่สุดระหว่าง TCP และรูปร่างวัตถุ