สร้างฐาน RoboDK
ตามขั้นตอนต่อไปนี้จะต้องถูกเตรียมไว้ในการทดสอบออฟไลน์:
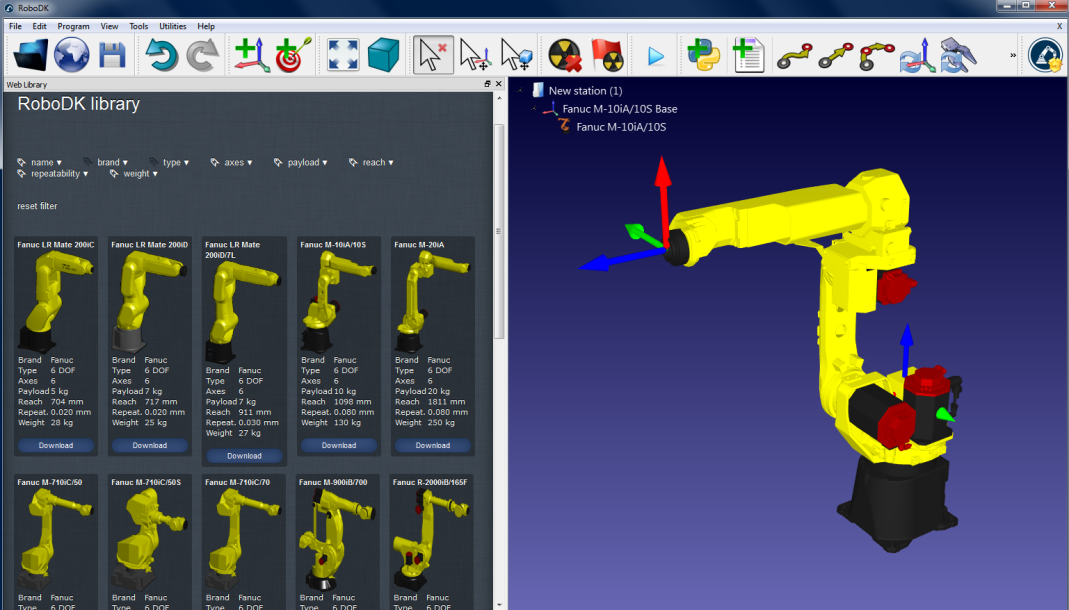
1.เลือกหุ่นยนต์:
a.เลือกFile➔Open online libraryวินโดว์จะปรากฏขึ้นในรายการหุ่นยนต์
b.(ไม่จำเป็น) ใช้ตัวกรองเพื่อปรับแต่งการเลือกของหุ่นยนต์
c.หาหุ่นยนต์ของคุณและเลือกDownload
โดยอีกทางเลือก, เลือกFile➔Open…และเลือกไฟล์หุ่นยนต์ในคอมพิวเตอร์ไฟล์นี้สามารถดาวน์โหลดได้จากเว็บไซต์: https://robodk.com/libraryหรือได้รับหลังจากโครงการวัดขนาดหุ่นยนต์
2.เพิ่มการโมดูลทดสอบ ballbar ในฐาน:
a.เลือกUtilities➔Ballbar accuracy test
b.วินโดว์ต่อไปนี้จะปรากฏและเป้าหมายBallbar centerจะถูกสร้างขึ้นอย่างอัตโนมัติถ้าหุ่นยนต์ไม่มี TCP, TCP Tool 1 จะถูกสร้างขึ้นอย่างอัตโนมัติ
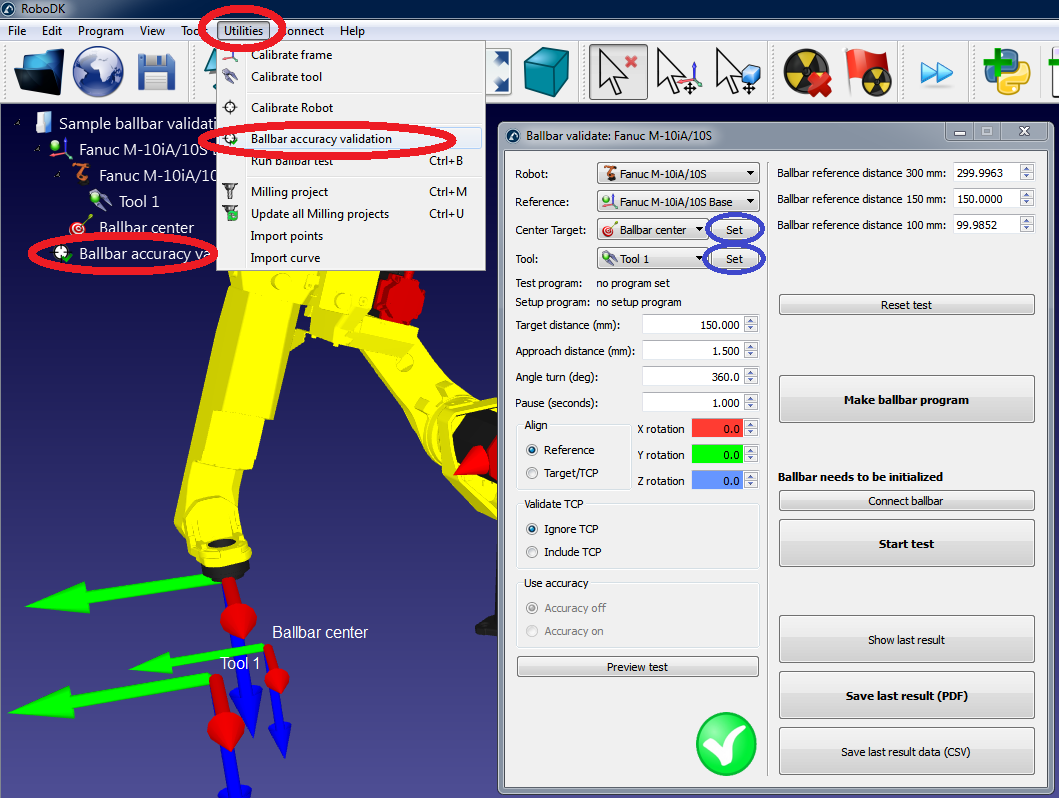
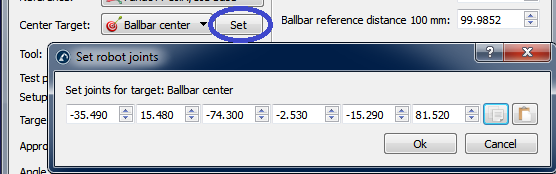
3.ป้อนการร่วมหุ่นยนต์ของศูนย์กลางการทดสอบ ballbar (เป้าหมายBallbar center):
a.เลือกSetในเป้าหมายถัดไป Ballbar center.
b.ป้อนค่าร่วมหุ่นยนต์ (ร่วมแกน 1 ถึง 6).
c.เลือก OK.
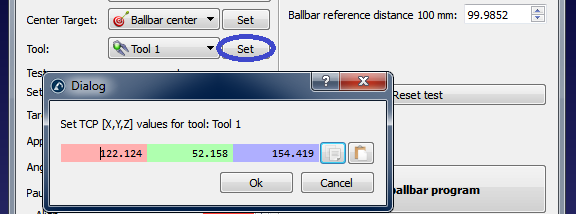
4.เข้าสู่พิกัด TCP :
a.เลือกSetในส่วนของเครื่องมือที่เลือก (Tool 1 ในตัวอย่างนี้)
b.ป้อนพิกัด X,Y,Z ของ TCP (สัมพันธ์กับหุ่นยนต์และการปฏิบัติงาน)
c.เลือก OK
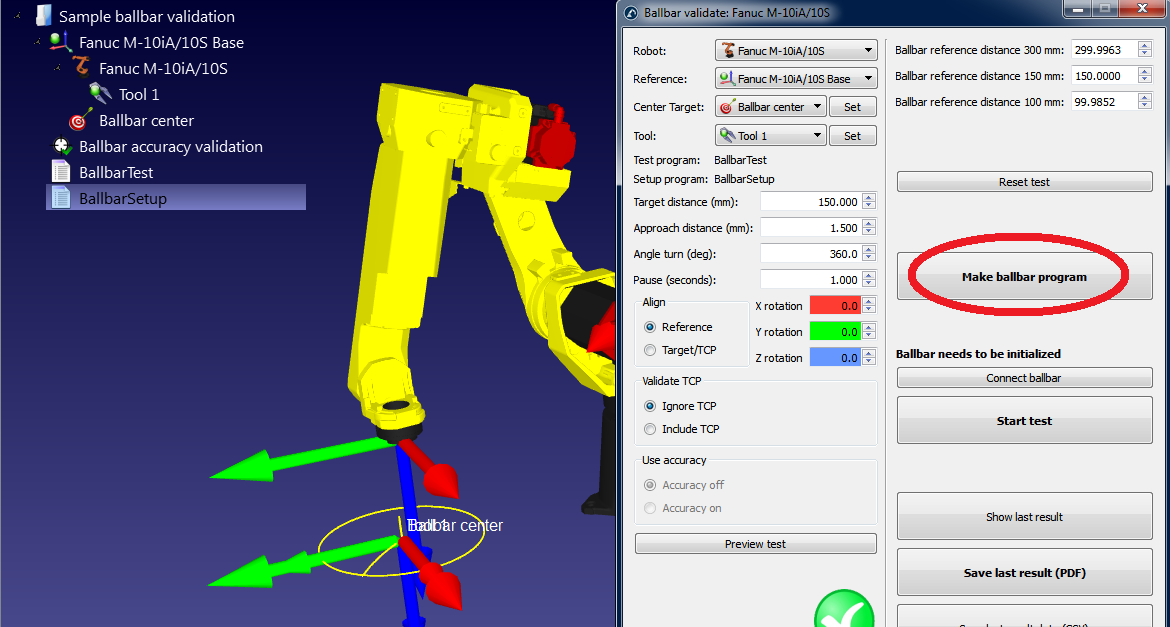
5.สร้างโปรแกรม:
a.เลือกMake ballbar programและโปรแกรมจะถูกสร้างขึ้นที่จริงแล้ว, สองโปรแกรมจะปรากฏ:
i.BallbarSetup: โปรแกรมนี้จะถูกใช้วางจุดศูนย์กลางของจุดหมุน (ศูนย์กลางของวงกลม) ในพื้นที่เดียวกันในตำแหน่งก่อนหน้านี้
ii.BallbarTest: โปรแกรมนี้ถูกใช้ทำวงกลมรอบจุดหมุน (ศูนย์กลางของวงกลม) สำหรับข้อมูลที่ได้มาจาก ballbar
b.ดับเบิ้ลคลิกโปรแกรมที่สร้างขึ้นมาใหม่ RoboDK จะจำลองการดำเนินการโปรแกรมหุ่นยนต์
ถ้าการทดสอบ ballbar เป๋นไปไม่ได้กับการตั้งค่าเริ่มต้น คุณสามารถเปลี่ยนการทดสอบพารามิเตอร์ ดูในส่วนถัดไปในวิธีการเปลี่ยนการตั้งค่าเหล่านี้
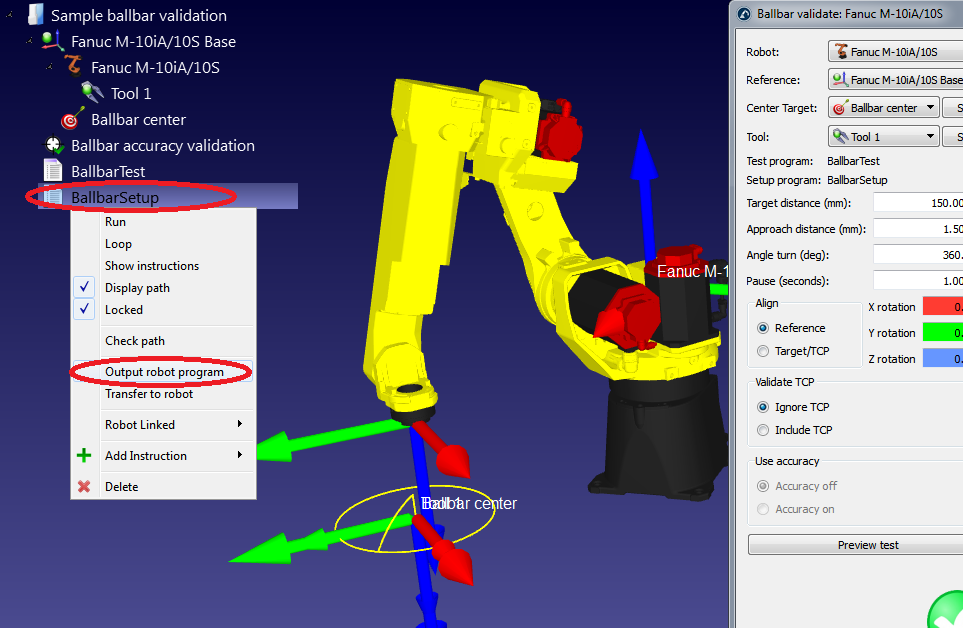
6.เมื่อโปรแกรมหุ่นยนต์ของกำลังเชื่อมต่อ, ไฟล์โปรแกรมสำหรับหุ่นยนต์สามารถถูกสร้างขึ้น:
a.คลิกขวาที่โปรแกรมBallbarTest
b.เลือกGenerate robot program
c.ทำซ้ำโปรแกรมBallbarSetup(ทุกโปรแกรมสามารถถูกสร้างอย่างอัตโนมัติบนหน้าจอโดยการกด F6)
d.จากนั้นโปรแกรมสามารถถูกบันทึกไว้ใน USB disk และถ่ายโอนหุ่นยนต์ด้วยการเชื่อมต่อ FTP สามารถถูกใช้กับหุ่นยนต์ส่วนใหญ่
7.สุดท้าย, เลือกFile➔Save Stationเพื่อบันทึกฐาน RoboDK ในไฟล์เดียวโครงการจะถูกเริ่มต่อใน RoboDK โดยการดับเบิ้ลคลิกที่ไฟล์ (รูปแบบrdk )