รายงานการทดสอบ Ballbar
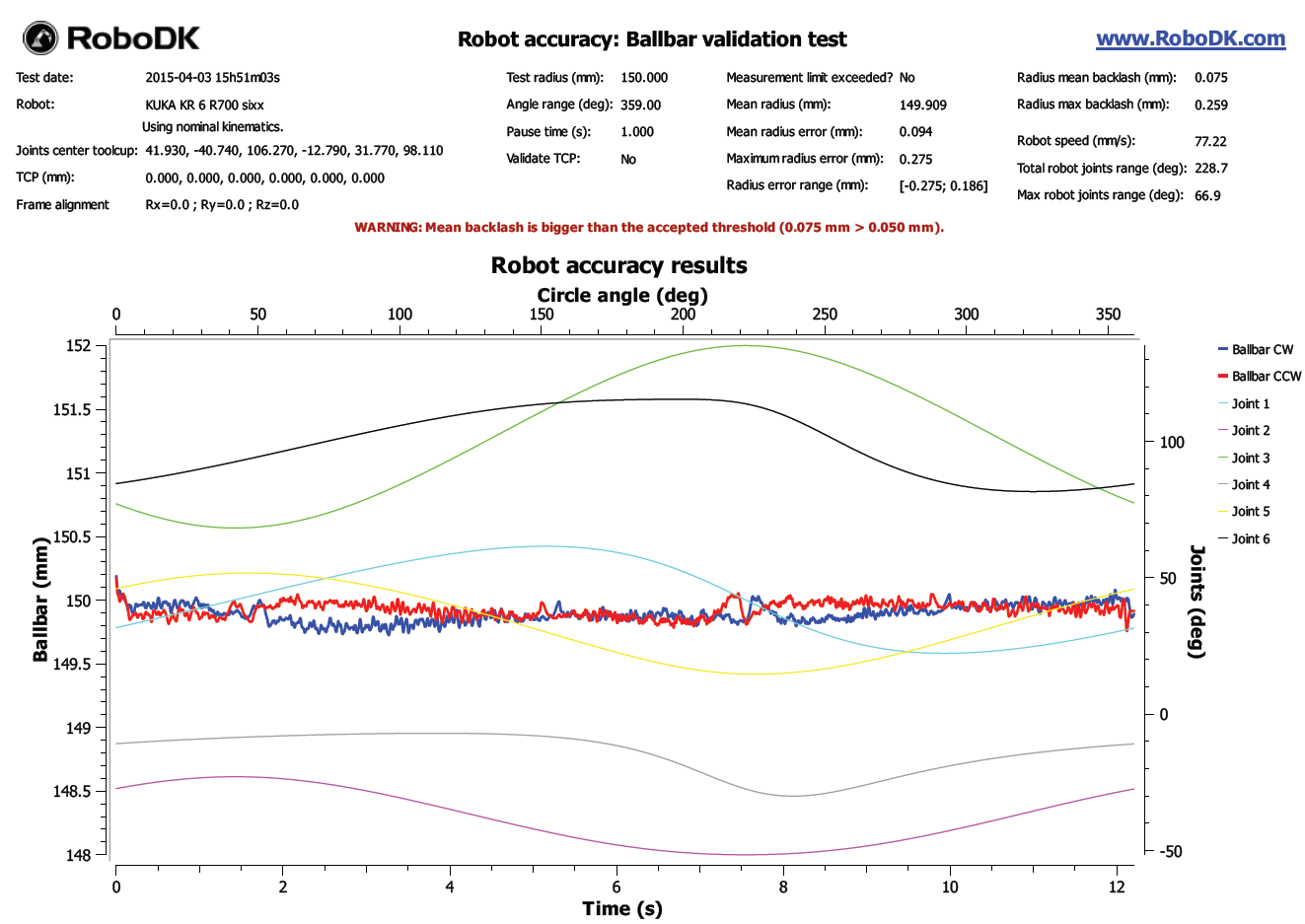
เมื่อการทดสอบ ballbar ได้สำเร็จแล้ว, รายงาน PDF ถูกได้รับมา (ตามที่แสดงในรูปต่อไปนี้):
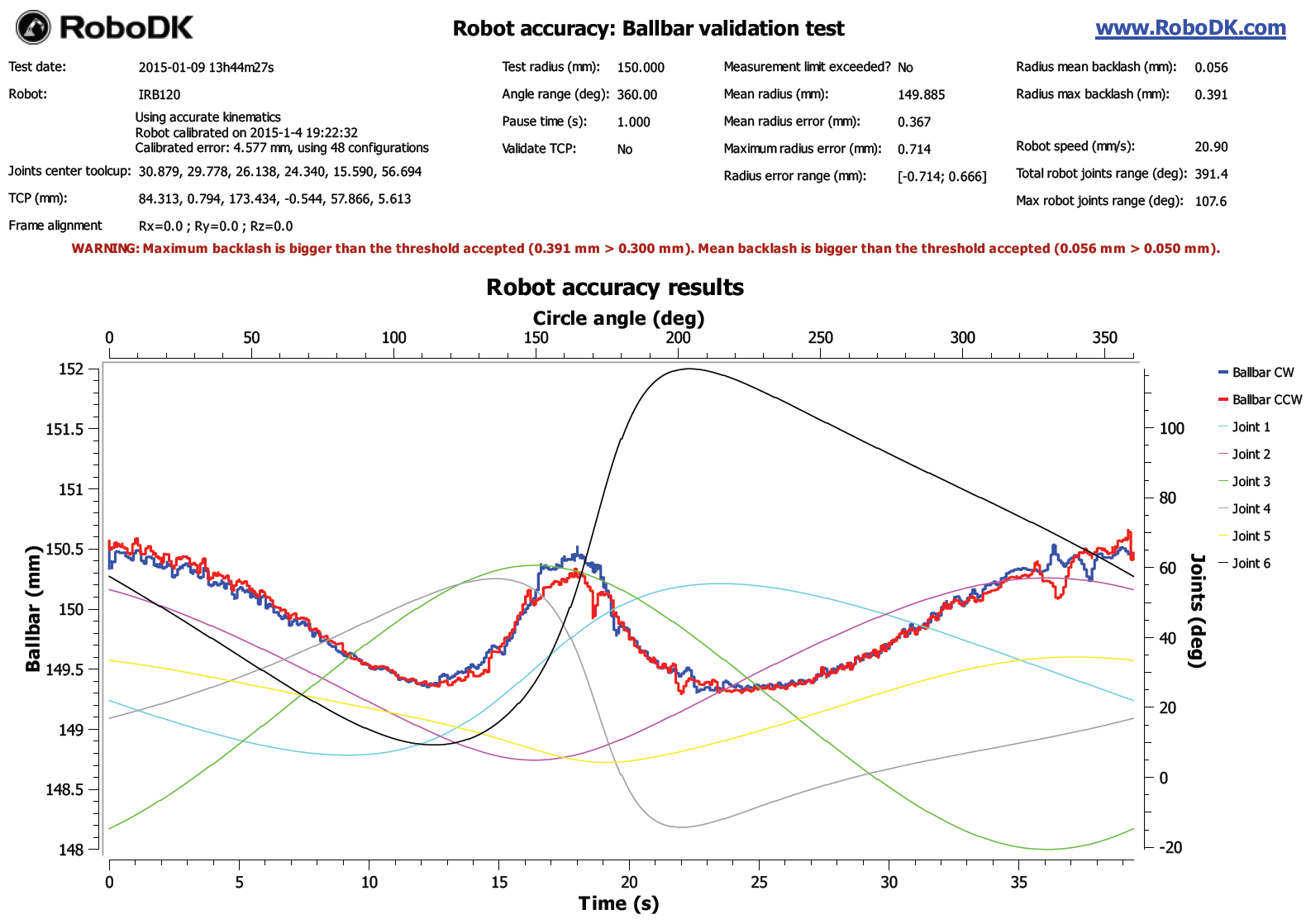
รายงานแสดงการอ่าน ballbar ในหน่วยมิลลิเมตร (แกน Y อยู่ทางด้านซ้าย) สำหรับการเคลื่อนไหวตามเข็มนาฬิกาและทวนเข็มนาฬิกา (เส้นสีน้ำเงินและสีแดงตามลำดับ)กับเวลาในหน่วยวินาที (ปุ่มแกน X) การร่วมหุ่นยนต์แสดงผลด้วย การร่วมหุ่นยนต์ถูกแสดงผลในองศา (แกน Y ถูกต้อง) กับมุมวงกลม (360 องศาหมายถึงรอบเต็ม) ความผิดพลาดมอเตอร์จะต้องแสดงการเปลี่ยนแปลงกาวัดที่พิจารณาเปลี่ยนเมื่อการเคลื่อนที่ร่วมที่เหมือนกันเปลี่ยนทิศทาง, สังเกตการสะท้อนกลับอย่างรุนแรงที่พิจารณา
รายงานจะขัดขวางผู้ใช้งานถ้าการสะท้อนกลับอย่างรุนแรงใหญ่ขึ้นมากกว่าทางเข้าที่ให้มา ทางเข้าสามารถกำหนดได้ในเมนูTools➔Options➔Accuracy tab.
ภาคผนวก – การเชื่อมต่อบลูทูธ #BallbarBluetooth
ในส่วนนี้อธิบายวิธีการจัดตั้งการเชื่อมต่อบลูทูธระหว่างคอมพิวเตอร์กับ ballbar สำหรับการติดต่อเพื่อการทำงาน, เราจะต้องจัดตั้งการติดต่อระหว่างคอมพิวเตอร์และไดร์เวอร์ ballbar ซึ่งใช้วินโดว์
“Windows Bluetooth Stack” จะต้องถูกเปิดใช้งาน (ค่าเริ่มต้นบลูทูธจัดการบนวินโดว์) คุณจะต้องเปิดขั้นตอนต่อไปนี้เพื่อจัดตั้งการเชื่อมต่อครั้งแรก:
1.เลือกปุ่มวินโดว์Start
2.เลือกControl Panel
3.มองหาคำว่าBluetooth
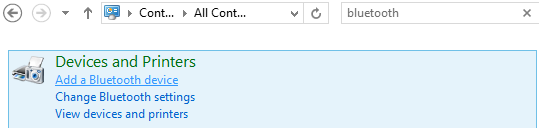
4.เลือกBluetooth devices
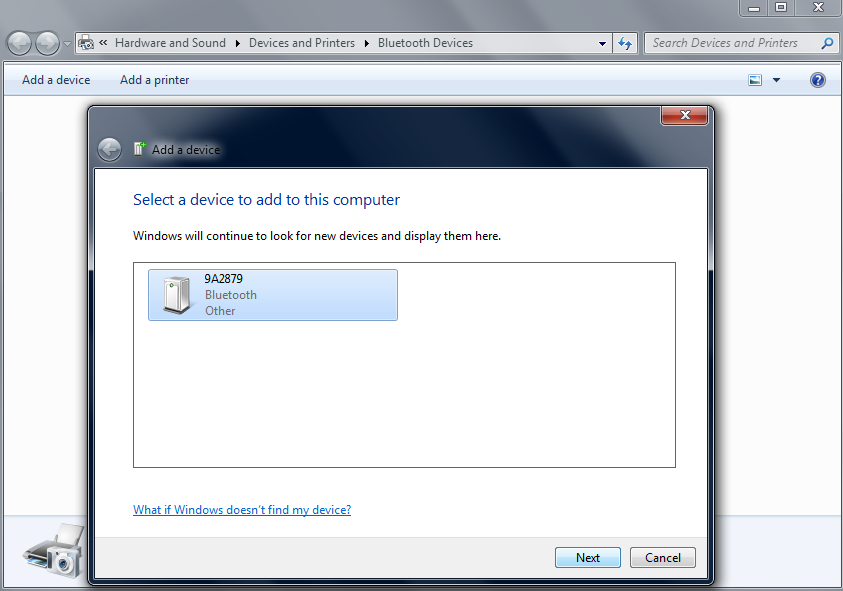
5.เลือกAdd a Deviceถ้าคุณไม่เห็นไดร์เวอร์ ballbar
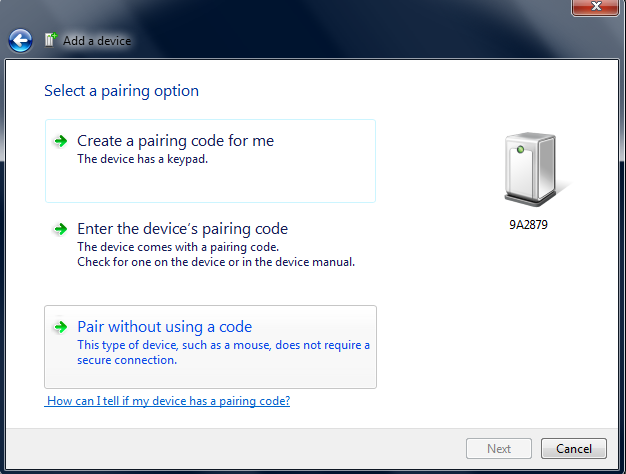
6.เมื่อไดร์เวอร์ถูกแสดงขึ้น คุณจะต้องเลือกมันจะเลือกNext. จำนวนที่คุณเห็นกลุ่มตัวเลข ballbar, ถูกพิมพ์บนไดร์เวอร์
7.สุดท้าย, คุณควรเลือกPair without using a code.
ไดร์เวอร์บลูทูธพร้อมสำหรับการวัดผ่าน RoboDK.
การเชื่อมต่อบลูทูธสามารถถูกจำกัดถ้าเราใช้ไดร์เวอร์บลูทูธร่วมกันในบางแล็ปท็อป (ถึงแม้ว่าสำหรับคอมพิวเตอร์ล่าสุด) มันถูกแนะนำให้ซื้อไดร์เวอร์บลูทูธภายนอกเพื่อการเชื่อมต่อการทำงานโดยไม่มีปัญหา
คอมพิวเตอร์ไม่ควรทำให้แตกต่างมากจากการใช้ไดร์เวอร์ ballbar ถ้าปัญหาเกิดขึ้นแล้วการเชื่อมต่อจะถูกแนะนำให้ใช้สายส่วนขยายสำหรับไดร์เวอร์บลูทูธ