การแก้ไขพารามิเตอร์การทดสอบ
ตามหน้าจอต่อไปนี้สามารถถูกเห็นได้ด้วยการทดสอบเมนูพารามิเตอร์ ballbar มันสามารถเข้าถึงได้โดยดับเบิ้ลคลิกในไอเทมBallbar accuracy validationในฐาน (ดูขั้นตอนก่อนหน้านี้)
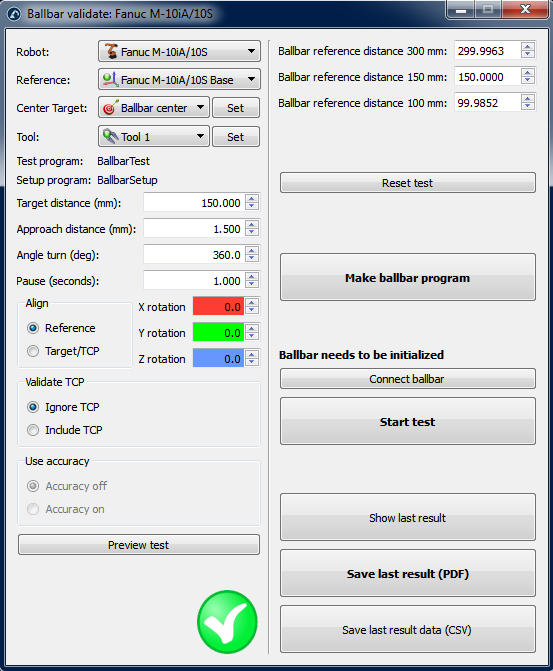
มันสามารถเป็นซึ่งการทดสอบ ballbar เป็นไปไม่ได้ตั้งแต่เริ่มต้น ความเป็นไปได้ของการทดสอบขึ้นอยู่กับค่าพารามิเตอร์บวกกับการร่วมหุ่นยนต์ของศูนย์กลาง toolcup และตำแหน่ง TCP
ถ้าการทดสอบเป็นไปไม่ได้แล้วในพื้นที่แรก, พวกเราสามารถเลือก “ภาพรวมการทดสอบ” และเราจะเห็นอย่างเหมาะสมในลำดับที่ไม่สมบูรณ์ ในตัวอย่างนี้, เราสามารถลด “มุมกลับ(องศา)” ซึ่งโปรแกรมเป็นไปได้ ถ้าไม่ใช่กรณีนี้, พวกเราสามารถลดเรเดียนของวงกลม (“ระยะทางเป้าหมาย”) ด้วยแถบเครื่องมือของ Renishaw พวกเราสามารถทดสอบระยะทาง 100 มิลลิเมตร, 150 มิลลิเมตรและ300 มิลลิเมตรด้วยความผิดพลาด +/-1 มิลลิเมตร “ระยะทางเข้าใกล้ (มิลลิเมตร)” และการพัก (“พัก (วินาที)”) สามารถถูกนำเอาออกโดยเริ่มต้น ค่าพารามิเตอร์อนุญาตการตรวจจับการเริ่มต้นและตอนจบของการทดสอบ
การทดสอบระนาบถูกหมุนกับหน้าต่างอ้างฐานหุ่นยนต์ (“การอ้างอิง” ในส่วน “ทำให้เป็นแนวเดียวกัน”) หมายความว่าระนาบ XY ของหน้าต่างอ้างอิงหุ่นยนต์ได้ถูกใช้สร้างวงกลม พวกเราสามารถเลือกสร้างการทดสอบกับหน้าต่างอ้างอิงเครื่องมือ ในกรณีนี้, ระนาบ XY ของเครื่องมือได้ถูกใช้ (เมื่อจุดศูนย์ถูกสอน) พวกเราสามารถเพิ่มการหมุนเพิ่มเติมกับแกน X, Y และ/หรือ Z ของหน้าต่างอ้างอิงในทั้งสองกรณี
ถ้าพวกเราเปลี่ยนพารามิเตอร์ที่มั่นคง (เช่นการเพิ่มการมือในการตรวจสอบ), ข้อความ “สำคัญ: TCP จะต้องแม่นยำ” จะปรากฏ หมายความว่าการเคลื่อนที่ถูกคำนวณกับจุดศูนย์กลางเครื่องมือ มิฉะนั้น, เราสามารถมีความผิดพลาด TCP และการทดสอบจะเป็นไปได้
ถ้าเราเลือกตัวเลือก“รวม TCP” เครื่องมือการหมุนเปลี่ยนการเคลื่อนที่ตามวงกลม ทางเลือกอนุญาตให้ประเมินผลความผิดพลาดหุ่นยนต์บวกกับเครื่องมือกับหนึ่งระบบ มิฉะนั้น, เรากำลังตรวจสอบความผิดพลาดของหุ่นยนต์เท่านั้น (“ละเลย TCP”)