ISO9283 Performance Testing
พื้นฐาน ISO “ISO9283: การจัดการหุ่นยนต์อุตสาหกรรม - เกณฑ์การปฏิบัติงานและวิธีการทดสอบที่เกี่ยวข้อง” อธิบายวิธีทดสอบเพื่อประเมินผลประสิทธิภาพของหุ่นยนต์อุตสาหกรรม เหนือสิ่งอื่นใด, มันอธิบายขั้นตอนการวัดตำแหน่งหุ่นยนต์อย่างเหมาะสม, การทำซ้ำและความแม่นยำเส้นทาง
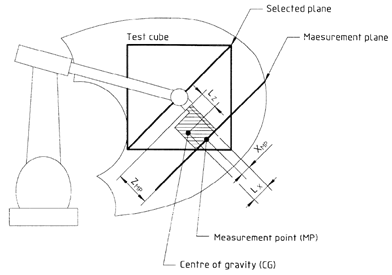
ตามบรรทัดฐาน ISO928, การทดสอบทั้งหมดควรจะทำภายในซึ่งที่เรียกว่า ISO การทดสอบลูกบาศก์ การทดสอบลูกบาศก์ถูกตั้งสมมติฐานให้เป็นลูกบาศก์ที่ใหญ่ที่สุดที่สามารถทำให้ที่ทำงานหุ่นยนต์พอดี ยิ่งไปกว่านั้น, ตำแหน่งความแม่นยำและการทำซ้ำควรจะถูกวัดโดย 5องค์ประกอบ 30 ครั้งซึ่งรู้จัก 5 องค์ประกอบนี้ไม่เพียงพอที่จะหาการวัดที่เหมาะสมสำหรับความแม่นยำของหุ่นยนต์สมัยใหม่
ผู้ผลิตหุ่นยนต์ส่วนใหญ่เท่านั้นที่หาตำแหน่งความแม่นยำ ถ้าหุ่นยนต์ได้ถูกวัดขนาดแล้ว, ยิ่งไปกว่านั้น, พวกเขาใช้อย่างน้อย 100 การกำหนดค่าเพื่อหาสถิติความแม่นยำตำแหน่งที่เหมาะสม หุ่นยนต์อุตสาหกรรมสามารถทำซ้ำได้สูงแต่ไม่แม่นยำ; ดังนั้น,ความแม่นยำของหุ่นยนต์อุตสาหกรรมสามารถถูกพัฒนาผ่านการวัดขนาด

พื้นที่ทำงานของหุ่นยนต์ทั่วไปในยุค 80พื้นที่ทำงานของหุ่นยนต์สมัยใหม่
แต่อย่างไรก็ตาม, บรรทัดฐาน ISO9283 สามารถถูกใช้สำหรับการทำซ้ำและการทดสอบความแม่นยำเส้นทางถึงแม้ว่าหุ่นยนต์ไม่ได้มีการถูกวัดขนาด

มันถูกแนะนำให้ชมวีดีต่อไปนี้ซึ่งแสดงการทดสอบความแม่นยำเส้นทางด้วย RoboDK: https://youtu.be/yMQjqAQY1iE.
RoboDK สามารถถูกใช้เพื่อวัดขนาดหุ่นยนต์และทดสอบประสิทธิภาพของมันก่อนและหลังการวัดขนาดสุดท้าย, RoboDK สามารถถูกใช้ทดสอบความแม่นยำของหุ่นยนต์ก่อนและหลังการวัดผ่านการทดสอบ ballbar