ISO9283 Performance Testing
บทนำ
พื้นฐาน ISO “ISO9283: การจัดการหุ่นยนต์อุตสาหกรรม - เกณฑ์การปฏิบัติงานและวิธีการทดสอบที่เกี่ยวข้อง” อธิบายวิธีทดสอบเพื่อประเมินผลประสิทธิภาพของหุ่นยนต์อุตสาหกรรม เหนือสิ่งอื่นใด, มันอธิบายขั้นตอนการวัดตำแหน่งหุ่นยนต์อย่างเหมาะสม, การทำซ้ำและความแม่นยำเส้นทาง
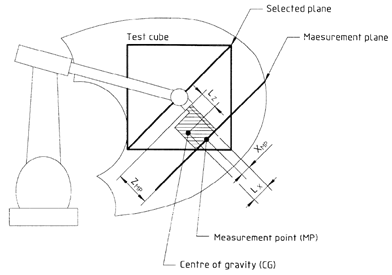
ตามบรรทัดฐาน ISO928, การทดสอบทั้งหมดควรจะทำภายในซึ่งที่เรียกว่า ISO การทดสอบลูกบาศก์ การทดสอบลูกบาศก์ถูกตั้งสมมติฐานให้เป็นลูกบาศก์ที่ใหญ่ที่สุดที่สามารถทำให้ที่ทำงานหุ่นยนต์พอดี ยิ่งไปกว่านั้น, ตำแหน่งความแม่นยำและการทำซ้ำควรจะถูกวัดโดย 5องค์ประกอบ 30 ครั้งซึ่งรู้จัก 5 องค์ประกอบนี้ไม่เพียงพอที่จะหาการวัดที่เหมาะสมสำหรับความแม่นยำของหุ่นยนต์สมัยใหม่
ผู้ผลิตหุ่นยนต์ส่วนใหญ่เท่านั้นที่หาตำแหน่งความแม่นยำ ถ้าหุ่นยนต์ได้ถูกวัดขนาดแล้ว, ยิ่งไปกว่านั้น, พวกเขาใช้อย่างน้อย 100 การกำหนดค่าเพื่อหาสถิติความแม่นยำตำแหน่งที่เหมาะสม หุ่นยนต์อุตสาหกรรมสามารถทำซ้ำได้สูงแต่ไม่แม่นยำ; ดังนั้น,ความแม่นยำของหุ่นยนต์อุตสาหกรรมสามารถถูกพัฒนาผ่านการวัดขนาด
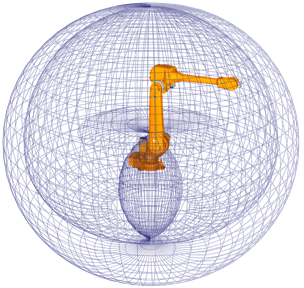
พื้นที่ทำงานของหุ่นยนต์ทั่วไปในยุค 80พื้นที่ทำงานของหุ่นยนต์สมัยใหม่
แต่อย่างไรก็ตาม, บรรทัดฐาน ISO9283 สามารถถูกใช้สำหรับการทำซ้ำและการทดสอบความแม่นยำเส้นทางถึงแม้ว่าหุ่นยนต์ไม่ได้มีการถูกวัดขนาด

มันถูกแนะนำให้ชมวีดีต่อไปนี้ซึ่งแสดงการทดสอบความแม่นยำเส้นทางด้วย RoboDK: https://youtu.be/yMQjqAQY1iE.
RoboDK สามารถถูกใช้เพื่อวัดขนาดหุ่นยนต์และทดสอบประสิทธิภาพของมันก่อนและหลังการวัดขนาดสุดท้าย, RoboDK สามารถถูกใช้ทดสอบความแม่นยำของหุ่นยนต์ก่อนและหลังการวัดผ่านการทดสอบ ballbar
ความต้องการ
ตามไอเทมต่อไปนี้ที่ต้องการติดตั้งใน RoboDK และทำงานการทดสอบความแม่นยำเส้นทางหุ่นยนต์อย่างเหมาะสม:
1.หนึ่งหรือมากกว่าแขนกลหุ่นยนต์อุตสาหกรรม
2.ระบบการวัด: เครื่องติดตามเลเซอร์เช่น Leica, API or Faro และ/หรือ optical CMM เช่น C-Track stereocamera จาก Creaform ควรทำงาน
3.ซอฟต์แวร์ RoboDK จะถูกติดตั้งและใบอนุญาตที่เหมาะสมสำหรับการทดสอบ ISO9283 สำหรับใบอนุญาตเครือข่าย, การเชื่อมต่ออินเตอร์จำเป็นต้องตรวจสอบใบอนุญาต เพื่อติดตั้งและอัพเดทRoboDK สำหรับการทดสอบประสิทธิภาพ:
a.ดาวน์โหลด RoboDK จากส่วนดาวน์โหลด
https://robodk.com/download
b.ตั้งค่าไดร์เวอร์สำหรับระบบการวัด (ไม่จำเป็นสำหรับ Creaform Optical CMM)
ขยายไฟล์และคัดลอกโฟลเดอร์ที่เหมาะสม:
เครื่องติดตามเลเซอร์ API: https://robodk.com/downloads/private/API.zip (OTII และเครื่องติดตามเรเดียน)
เครื่องติดตามเลเซอร์ Faro: https://robodk.com/downloads/private/Faro.zip (เครื่องติดตาม Faro ทั้งหมด)
เครื่องติดตามเลเซอร์ Leica: https://robodk.com/downloads/private/Leica.zip (เครื่องติดตาม Leica ทั้งหมด)
ลงในโฟลเดอร์: C:/RoboDK/api/
การตั้งค่าออฟไลน์
มันถูกแนะนำให้สร้างสิ่งรอบข้างให้เสมือนจริงของการตั้งค่าจริงใน RoboDK (ตั้งค่าออฟไลน์) เพื่อเตรียมเส้นทางและตำแหน่งสำหรับการทดสอบ สามารถทำได้ก่อนจะมีหุ่นยนต์และเครื่องติดตาม, เพียงการใช้คอมพิวเตอร์ที่ติดตั้งด้วย RoboDK การวัดขนาด RoboDK และทางการตั้งค่าตรวจสอบ ตัวอย่างสามารถดาวน์โหลดได้ในโฟลเดอร์:
https://www.robodk.com/downloads/calibration/
RoboDK มีประโยชน์เพื่อการสร้างองค์ประกอบและเส้นทางที่แนะนำโดยการตั้งพื้นฐาน ISO9283 เพื่อใช้ประโยชนนี้:
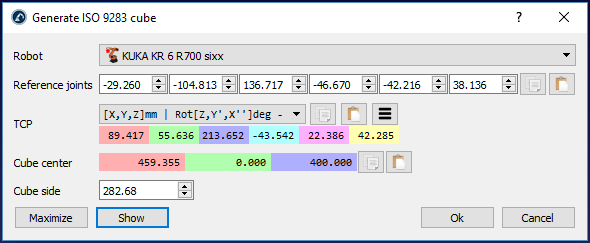
1.Utilities➔Create ISO 9283 cube (เป้าหมายและเส้นทาง)
2.เข้าสู่การร่วมการอ้างอิง (ตำแหน่งหุ่นยนต์ที่เครื่องมือเจอกับเครื่องติดตาม)
3.ปรับตำแหน่งและขนาดของลูกบาศก์
4.เลือก OK
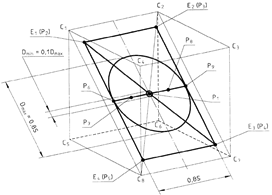
เป็นการสร้าง 5 เป้าหมายซึ่งอธิบายโดยบรรทัดฐาน ISO และเส้นทางที่ถูกนำโดยการทดสอบความแม่นยำเส้นทาง เป้าหมายเหล่านี้และเส้นทางยังเหลือภายในลูกบาศก์ซึ่งตั้งอยู่ข้างหน้าหุ่นยนต์ พวกเราสามารถตั้งค่าลูกบาศก์ทีต้องการและย้ายศูนย์กลาง (เป้าหมาย “ISO p1”) และการอ้างอิงร่วมกันซึ่งจะกำหนดการหมุนของเส้นทาง อีกทั้งยังสามารถเพิ่มขนาดลูกบาศก์เพื่อหาลูกบาศก์ที่ใหญ่ที่สุดซึ่งทำให้พอดีในพื้นที่ทำงานหุ่นยนต์
ฐานตัวอย่างกับการวัดขนาดหุ่นยนต์และทางเลือกการตรวจสอบหุ่นยนต์ถูกแสดงในรูปภาพต่อไปนี้

ความแม่นยำทางตำแหน่งและการทำซ้ำ
ขั้นตอนเดียวกันซึ่งใช้การตรวจสอบความแม่นยำตำแหน่งระหว่างการวัดขนาดหุ่นยนต์สามารถถูกใช้การทดสอบความแม่นยำตำแหน่ง สถิติการทำซ้ำสามารถถูกได้รับถ้าการวัดได้ถูกนำมาตามลำดับผ่านกลุ่มเดียวกันของจุด ความแตกต่างเท่านั้นระหว่างการทำงานเท่านั้นหรือการวัดขนาดและการตรวจสอบเป็นทางเลือกที่ไม่จำเป็นต้องมีใบอนุญาตวัดขนาดหุ่นยนต์
เพื่อทำงานเช่น การตรวจสอบ คุณควรเลือกเมนู :
●Utilities➔Test position accuracy & repeatability (ISO 9283)
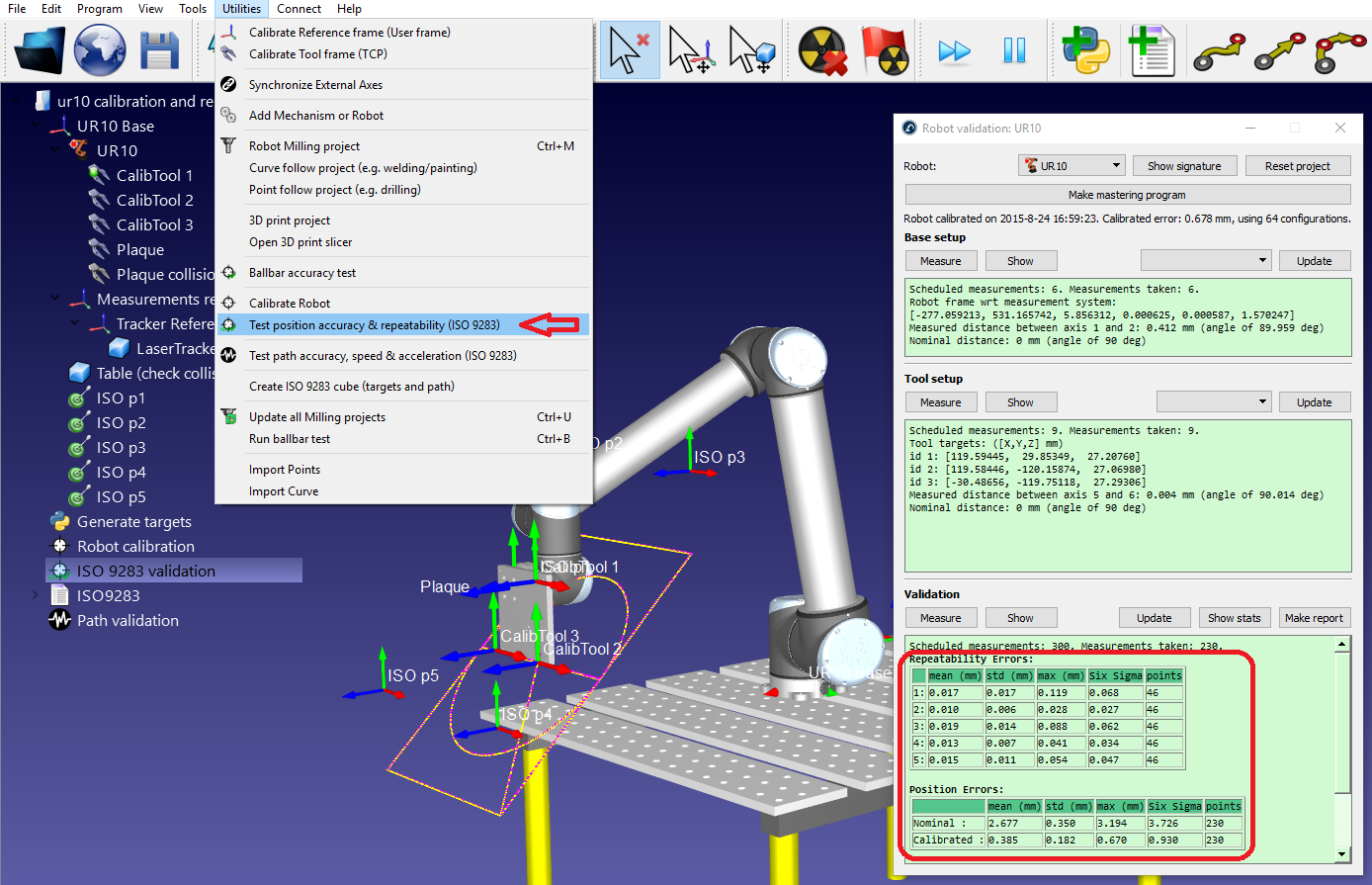
การทดสอบเหล่านี้จำเป็นต้องทำแยกแยะหน้าต่างฐานหุ่นยนต์ด้วยกับหน้าต่างอ้างอิงการวัด (การตั้งค่าฐาน) และหน้าต่างเครื่องมือกับหน้าแปลนหุ่นยนต์ด้วย (ตั้งค่าเครื่องมือ)
เป็นไปได้ที่จะรับรายการ PDF เมื่อการทดสอบความแม่นยำตำแหน่งและการทำซ้ำได้เสร็จสมบูรณ์
ความแม่นยำเส้นทาง
เพื่อทำการทดสอบความแม่นยำเส้นทาง, มันจำเป็นต้องมีโปรแกรมหุ่นยนต์ซึ่งถูกสร้างด้วย RoboDK,เช่น ISO9283 โปรแกรมที่ถูกสร้างด้วย Create ISO cube utility พวกเราสามารถสร้างโปรแกรมหุ่นยนต์ผู้ขายเฉพาะโดยการเลือกโปรแกรมและกด F6(หรือการเลือกProgram➔Generate program) อีกทางเลือกหนึ่ง, เป็นไปได้ที่จะใช้โปรแกรมอื่นที่ถูกสร้างใน RoboDK(เช่นเส้นตรง, วงกลมหรือสี่เหลี่ยม)
มันยังจำเป็นต้องมีระบบการวัดที่สามารถติดตามตำแหน่งของผลกระทบสุดท้ายและหาการวัดตำแหน่งด้วยหน้าต่างอ้างอิง มันจำเป็นต้องใช้การตั้งค่าฐานและขั้นตอนการตั้งค่าเครื่องมือใน RoboDK (จำเป็นต้องใช้การทดสอบการวัดขนาดและความแม่นยำตำแหน่ง) เพื่อระบุหน้าต่างฐานหุ่นยนต์และหน้าต่างเครื่องมือ
ข้อมูลการวัดจะต้องได้มาขณะการย้ายหุ่นยนต์ระหว่างโปรแกรม การวัดควรจะถูกบันทึกอย่างต่อเนื่อง, การใช้ซอฟต์แวร์เริ่มต้นถูกจัดหาโดยผู้ผลิตของระบบการวัด มันจำเป็นต้องส่งออกการวัดโดยไฟล์CSV หรือ TXT ไฟล์เหล่านี้จะต้องประกอบไปด้วยข้อมูลตำแหน่ง XYZ และตราประทับเวลาสำหรับแต่ละการวัด โดยอีกทางเลือกหนึ่ง, การวัดค่าเหล่านี้สามารถประกอบด้วยการหมุนของเครื่องมือกับฐานหุ่นยนต์
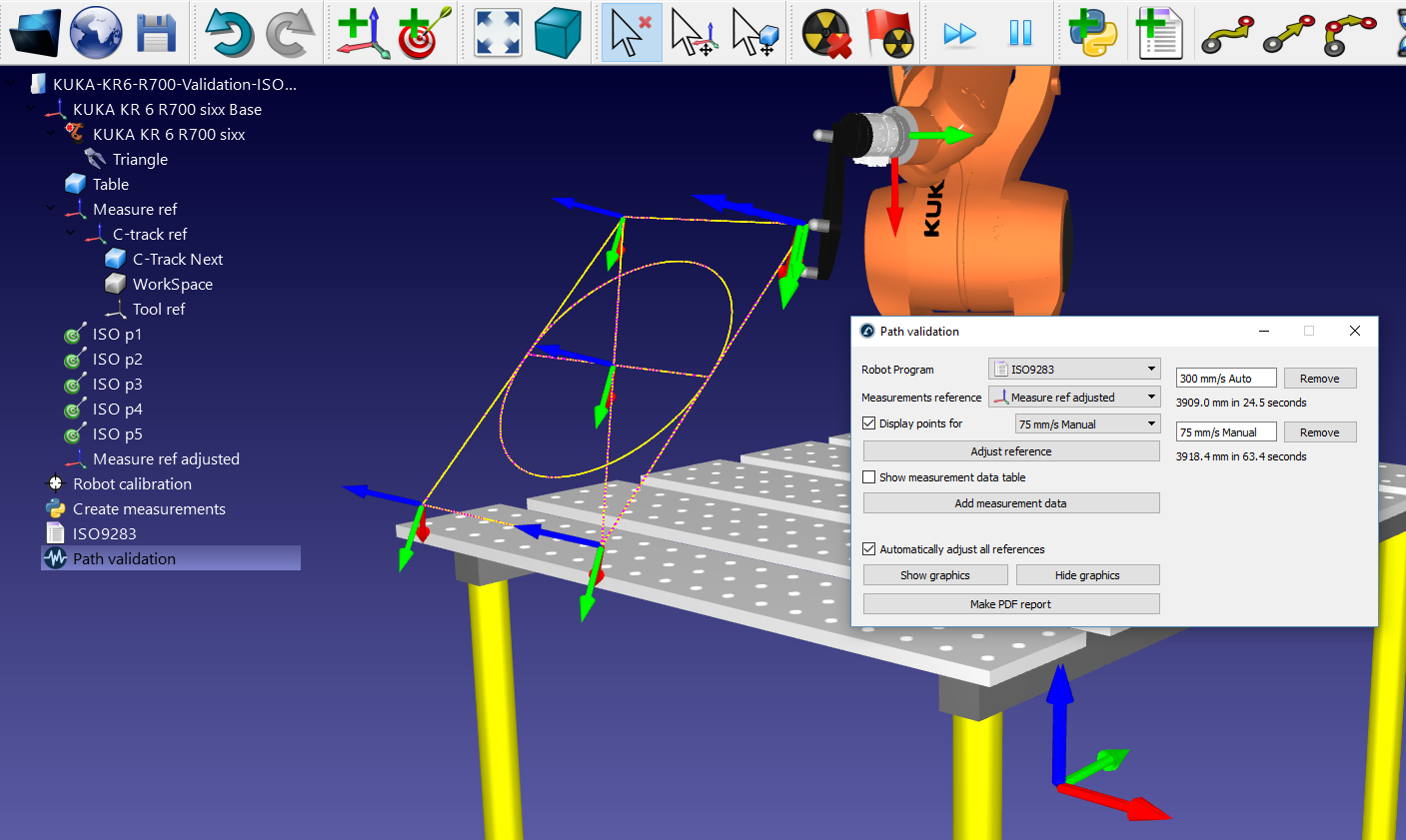
เพื่อเริ่มต้นโครงการการตรวจสอบเส้นทางใน RoboDK:
1.เลือกUtilities➔Test path accuracy, speed and acceleration (ISO 9283)
2.เลือกโปรแกรมที่ใช้สำหรับการตรวจสอบจากเมนูด้านล่าง
3.จัดหาหน้าต่างอ้างอิงซึ่งใช้การวัด
4.นำเข้าข้อมูลการวัดโดยการเลือกAdd measurement data. อีกทางเลือกหนึ่ง, มันเป็นไปได้ที่จะลาก& วางไฟล์CSVหรือTXT ซึ่งประกอบไปด้วยการวัดวินโดว์การตรวจสอบเส้นทาง
สุดท้าย, เลือกMake PDF reportเพื่อสร้างPDF ด้วยสถิติบางอย่างและกราฟิกเกี่ยวกับแม่นยำเส้นทาง, ความเร็วและความเร่ง อีกทั้งยังสามารถดำเนินการทดสอบเดียวกันมากกว่าเงื่อนไขที่แตกต่างกันก่อนหน้า(ความเร็วที่แตกต่าง, ค่าการล้อมรอบ/การทำมุมที่แตกต่างกัน, น้ำหนักบรรทุกที่แตกต่างกัน, …) เพื่อทดสอบค่าพารามิเตอร์เหล่านี้ในรายงานเดียวกัน
จุดการวัดสามารถถูกแสดงผลในสีม่วง การวัดเหล่านี้ควรจับคู่กับเส้นเหลืองซึ่งอธิบายเส้นทางที่เหมาะสมซึ่งหุ่นยนต์จะต้องทำตาม สถิติที่จัดหาสำหรับ RoboDK เป็นความแตกต่างระหว่างสองเส้นทางเหล่านี้
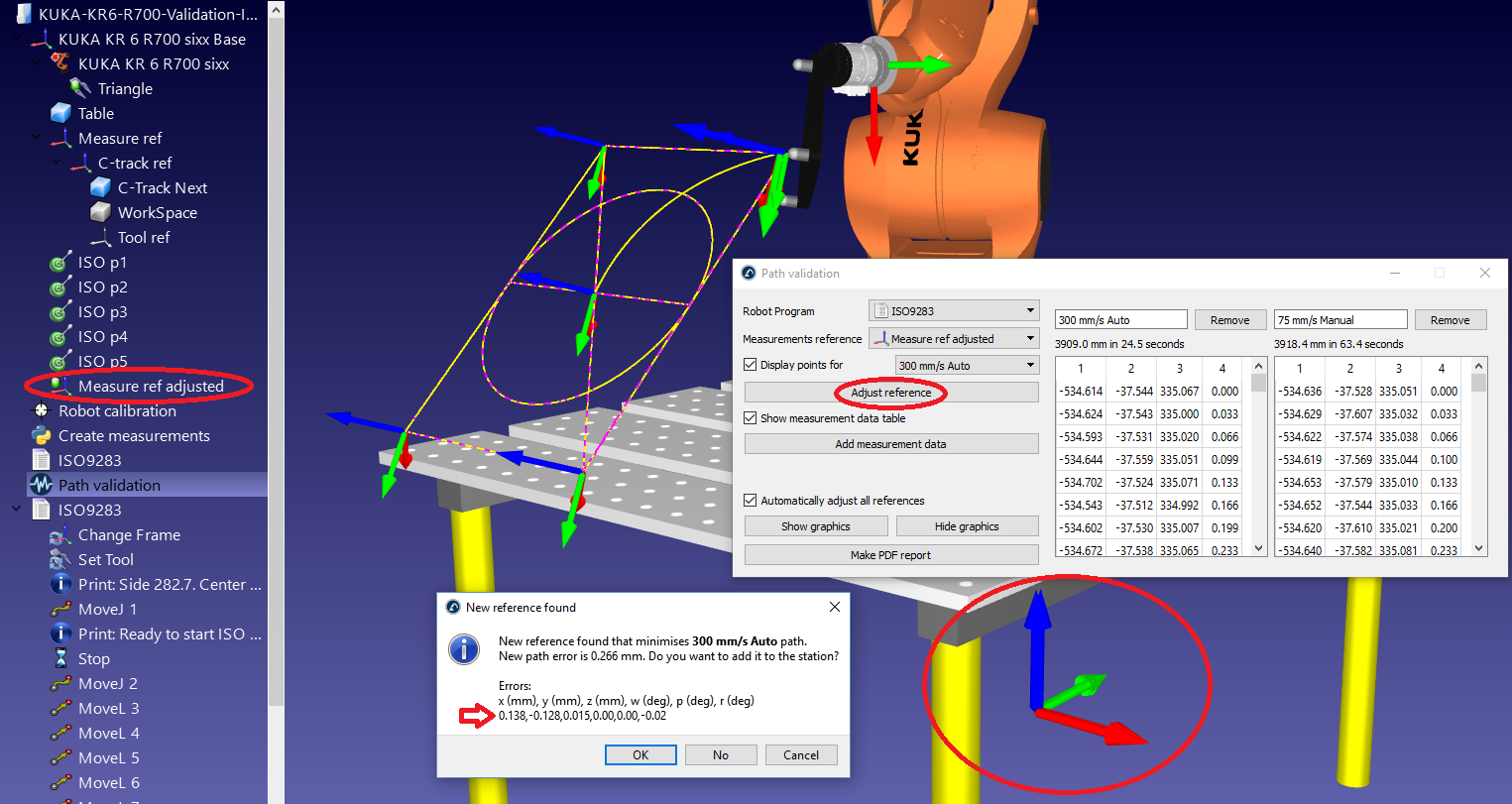
ถ้าหน้าต่างอ้างอิงไม่ได้ถูกกำหนดจุดการวัดอย่างเหมาะสมจะไม่จับคู่เส้นสีเหลือง เหตุการณ์นี้สามารถเกิดขึ้นได้จากหลายเหตุผล, เช่นคำจำกัดความหน้าต่างอ้างอิงไม่ดีหรือคำจำกัดความเครื่องมือแตกต่างกัน ในกรณีนี้สามารถเลือก Adjust reference จะช่วยลองทำให้สองเส้นทางพอดีที่สุดซึ่งสถิติจะถูกจัดหาแยกความไม่เท่ากันเหล่านี้
ผลลัพธ์
เมื่อการทดสอบความแม่นยำเส้นทางถูกทำให้เสร็จ ซึ่งเป็นไปได้ที่ได้รับรายงาน PDF โดยการเลือก Make PDF report จากวินโดว์การตรวจสอบเส้นทาง จะเป็นการสร้าง PDF ด้วยสถิติและกราฟิกเกี่ยวกับความแม่นยำเส้นทาง, ความเร็วและความเร่ง
ผลลัพธ์ของตัวอย่างการทดสอบถูกจัดเตรียมไว้ในส่วนก่อนหน้าที่ซึ่งถูกแสดงในรูปภาพต่อไปนี้ ดังตัวอย่าง,โปรแกรม ISO9283 ถูกดำเนินการในสองโหมดที่แตกต่างกัน:
●โหมดทั่วไปที่ความเร็ว 75 มิลลิเมตร/วินาที
●โหมดอัตโนมัติที่ความเร็ว 300 มิลลิเมตร/วินาที
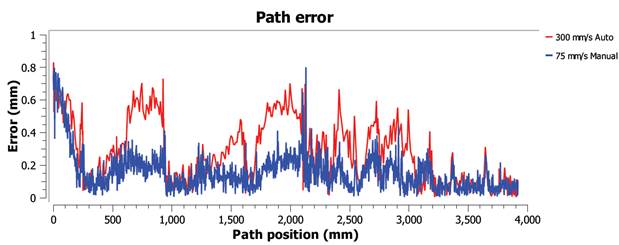
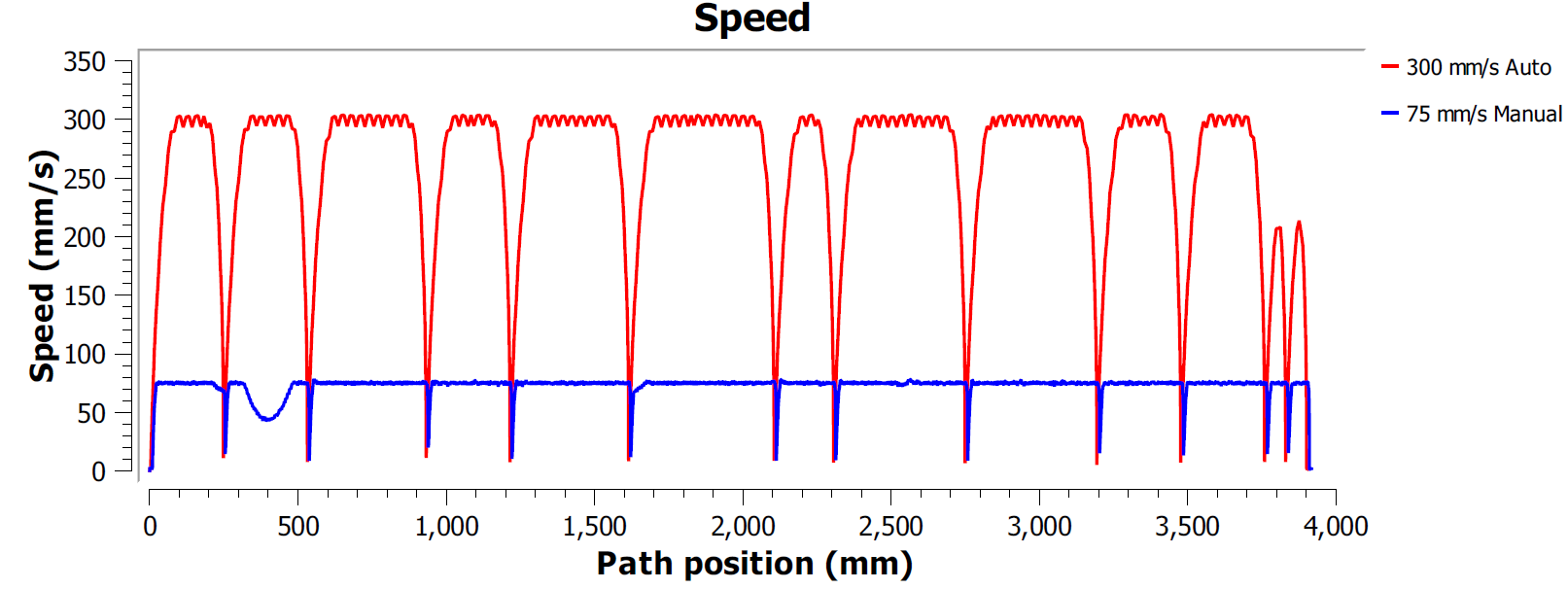
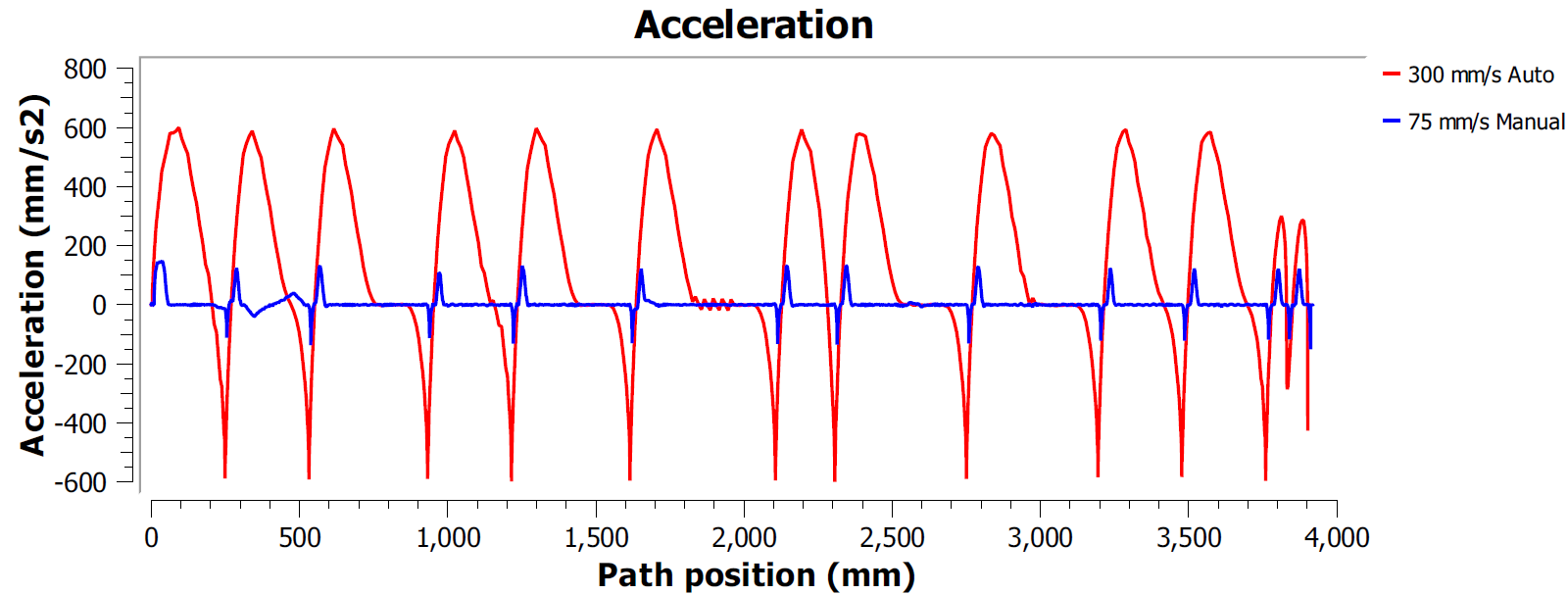
ในตัวอย่างนี้, โปรแกรมทั้งสองอันนี้ถูกสร้างโดยการใช้ Fine accuracy นั้นหมายความว่าหุ่นยนต์จะหยุด ณ ทุกจุดที่ทำให้เส้นทางแม่นยำเท่าที่เป็นไปได้ ในกรณีนี้, เป็นปกติที่นำสังเกตความเร่งและความหน่วงระหว่างเส้นทางเพราะความเร็วจะต้องเป็นศูนย์ ณ จุดสุดท้ายของเส้นหรือการเคลื่อนที่วงกลม (มุม)
ยี่ห้อหุ่นยนต์เสนอทางเลือกล้อมรอบเพื่อหลีกเลี่ยงผลกระทบนี้โดยการทำขอบให้เรียบ ดังตัวอย่าง,ABB เรียก ZoneData และอนุญาตการระบุโซน a ของความแม่นยำที่ตัวควบคุมถูกอนุญาตให้ทำขอบเรียบ Fanuc เรียก CNC อนุญาตการระบุเปอร์เซ็นต์ของสัดส่วนการทำให้เรียบตามความเร็ว KUKA เสนอคำแนะนำ $ADVANCE ด้วยธงC_DIS และหุ่นยนต์ Universal อนุญาตให้ระบุการเบี่ยงเบนเรเดียนตามความเรียบของขอบ
ดังนั้น, ความแม่นยำเส้นทางทดสอบการหาความพอดีระหว่างการรักษาความเร็วระหว่างระดับแม่นยำที่เหมาะสมใกล้กับขอบของเส้นทาง
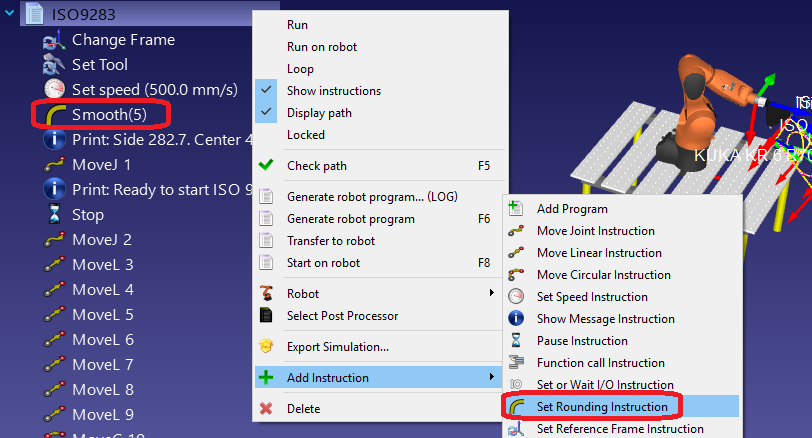
มันเป็นไปได้ที่ระบุค่าพารามิเตอร์ในRoboDKและความเร็วของโปรแกรม เพื่อแก้ไขโปรแกรมสำหรับการทดสอบ:
1.คลิกขวาที่โปรแกรม
2.เลือกแสดงคำแนะนำ
3.เลือกคำแนะนำแรกหรือสอง
4.เลือกProgram➔Set Rounding Instructionเพื่อระบุความแม่นยำโดยรอบ
5.เลือกProgram➔Set Speed Instruction เพื่อระบุความเร็ว