เคลื่อนย้ายโปรแกรมผ่าน FTP
โปรแกรมสามารถถูกเคลื่อนย้ายอย่างง่ายดายผ่าน RoboDK สำหรับหุ่นยนต์ ABB:
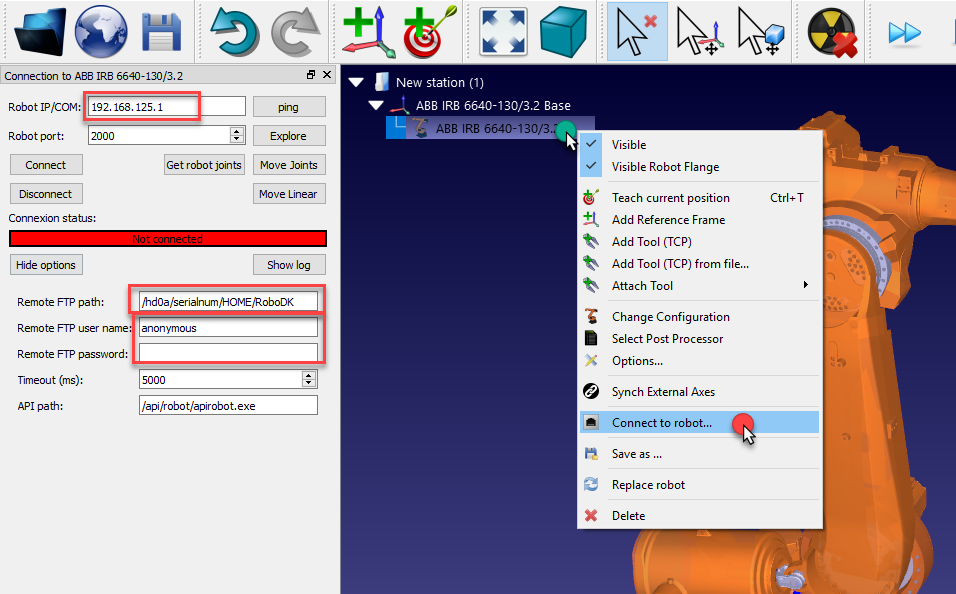
1.คลิกขวาที่หุ่นยนต์ใน RoboDK
2.เลือกConnect to robot…
3.ป้อน IP ของหุ่นยนต์
4.เข้าสู่วิธีการรีโมท FTP
เส้นทางที่สำเร็จสามารถถูกทดสอบจากการสอน pendant หรือการใช้ FileZilla FTP Client
5.ป้อนหนังสือรับรอง FTP (ไม่ระบุโดยการเริ่มต้น)
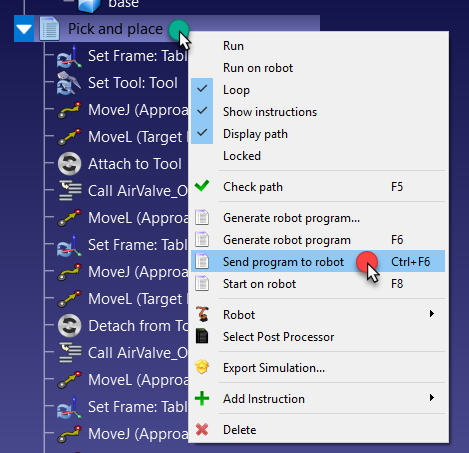
เมื่อโปรแกรม RoboDK ได้พร้อมที่จะส่งไปถึงหุ่นยนต์แล้ว:
1.คลิกขวาโปรแกรมใน RoboDK
2.เลือกSend program to robot (Ctrl+F6)
จะเป็นการสร้างโปรแกรมและพยายามถ่ายโอนไปถึงหุ่นยนต์ควบคุม วินโดว์จะป็อปอัพแสดงขึ้นถ้าการถ่ายโอน TFP ได้ถูกทำให้สำเร็จหรือไม่ก็ตาม
เมื่อโปรแกรมถูกถ่ายโอนผ่าน FTP เราจำเป็นต้องถูกโหลดโดยการใช้การเขียนโปรแกรม RAPID บนด้านชองหุ่นยนต์ ตัวอย่างต่อไปนี้จะดำเนินการโดยโปรแกรมmain_RoboDK จากโมดูลที่เรียกว่า MOD_Pick_and_place:
PERS bool progloaded := FALSE;
. . .
PROC Run_Program_FTP()
IF (progloaded=FALSE) THEN
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ELSE
UnLoad "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = FALSE;
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ENDIF
%main_RoboDK%; !call the main program from the module send and loaded
ENDPROC