หุ่นยนต์ ABB
RoboDK สนับสนุนหุ่นยนต์ ABB ทั้งหมดซึ่งถูกเขียนในภาษา RAPID, รวมถึงไฟล์ PRG และ MOD (หุ่นยนต์ควบคุม IRC5, S4 และS4C). ในเอกสารนี้เป็นพื้นฐานของหุ่นยนต์ควบคุมIRC5 ABB
ตามส่วนต่อไปนี้ ระบบปฏิบัติการสาธิตตามแบบฉบับซึ่งใช้หุ่นยนต์ ABB ซึ่งการสอน pendant เพื่อเตรียมตัวโปรแกรมใหม่ใน RoboDK เพื่อนเคลื่อนย้ายไฟล์ไปยังหุ่นยนต์
เคลื่อนย้ายโปรแกรมหุ่นยนต์
ตามขั้นตอนต่อไปนี้เพื่อโหลดโมดูลโปรแกรม(ไฟล์ MOD) จาก USB disk:
1.เลือกABB➔Program editor
2.เลือกModules, บนด้านบนสุดของหน้าจอ
3.เลือกไฟล์➔โหลดโมดูล (ไม่สำคัญสำหรับโปรแกรมตัวชี้/ PP ได้สูญหาย)
4.เลือกไฟล์ MOD จาก USB disk
5.เลือกOK
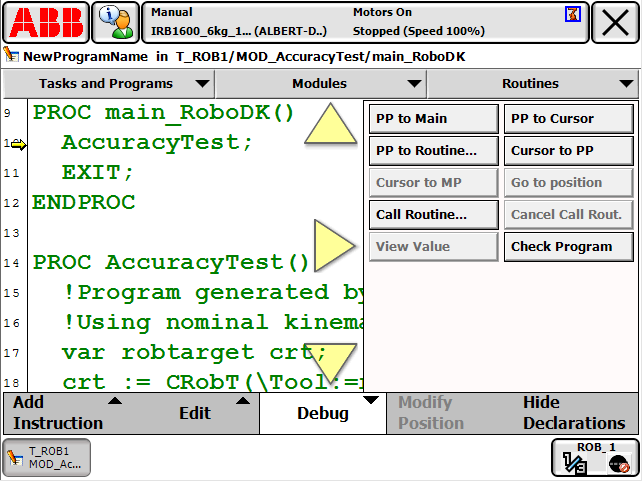
เริ่มต้นโปรแกรมหุ่นยนต์
ตามขั้นตอนดังต่อไปนี้เพื่อเริ่มโปรแกรมหุ่นยนต์เฉพาะในหุ่นยนต์ควบคุม ABB:
1.สามารถสลับตัวควบคุมเป็นโหมดคู่มือการใช้ข้อความ “Manual” บนด้านบนของแถบเมนูควรจะถูกแสดงผล
2.เลือก: ABB➔Program editor➔Debug➔PP to routine
3.เลือกโปรแกรมที่ถูกสร้างโดย RoboDK main_RoboDK เป็นชื่อค่าเริ่มต้น
4.กดค้าง “dead man” เพื่อสลับจากการสอนpendant ข้อความ “เปิดมอเตอร์” ตามสถานะของหุ่นยนต์ควรจะเห็นได้ด้วยแสงหุ่นยนต์สีส้มควรจะเปิด
5.เลือกปุ่มเล่นบนการสอน pendant เพื่อเริ่มต้นโปรแกรม
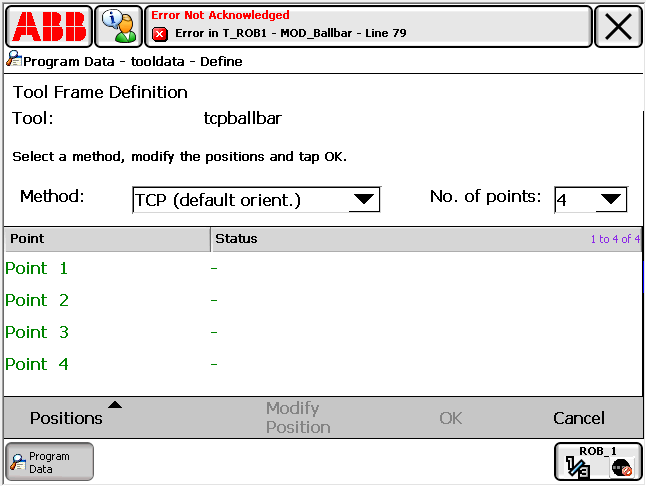
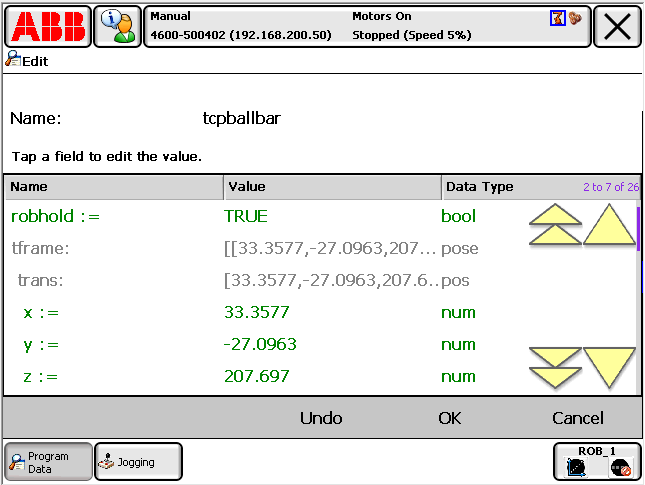
การดึงข้อมูลจาก TCP
ตามขั้นตอนดังต่อไปนี้เพื่อให้สร้างหรือดัดแปลงเครื่องมือหุ่นยนต์(TCP, รู้จักกันในชื่อtooldataในการเขียนโปรแกรม ABB):
1.เลือกABB➔Program data➔tooldata (ดับเบิ้ลคลิก)
2.เป็นไปได้ที่จะสร้างหรือดัดแปลงตัวแปรเครื่องมือที่มีอยู่
3.เมื่อเครื่องมือได้ถูกกำหนด เราสามารถให้ค่า X,Y,Z ของ TCP สามารถถูกดึงข้อมูลได้
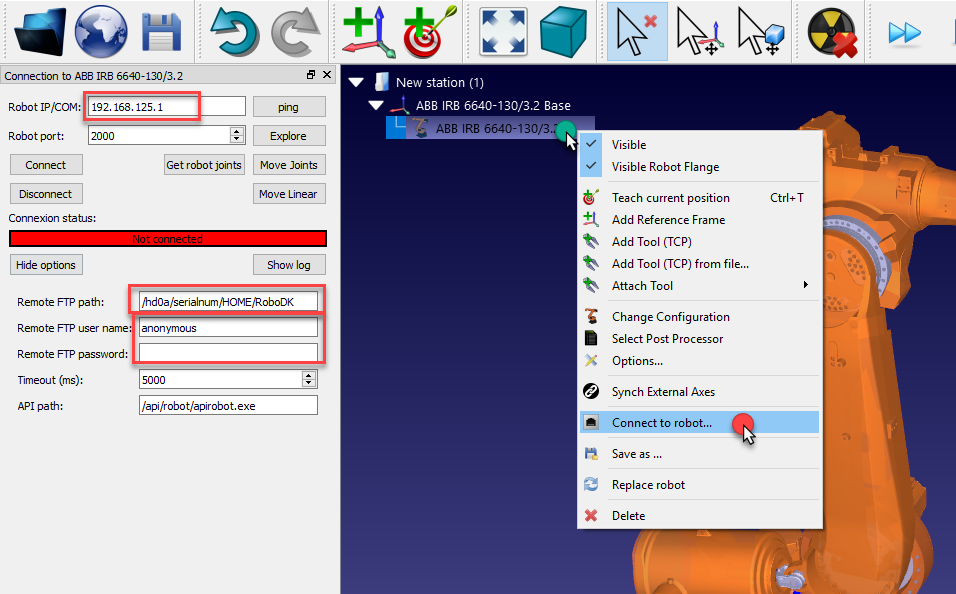
เคลื่อนย้ายโปรแกรมผ่าน FTP
โปรแกรมสามารถถูกเคลื่อนย้ายอย่างง่ายดายผ่าน RoboDK สำหรับหุ่นยนต์ ABB:
1.คลิกขวาที่หุ่นยนต์ใน RoboDK
2.เลือกConnect to robot…
3.ป้อน IP ของหุ่นยนต์
4.เข้าสู่วิธีการรีโมท FTP
เส้นทางที่สำเร็จสามารถถูกทดสอบจากการสอน pendant หรือการใช้ FileZilla FTP Client
5.ป้อนหนังสือรับรอง FTP (ไม่ระบุโดยการเริ่มต้น)
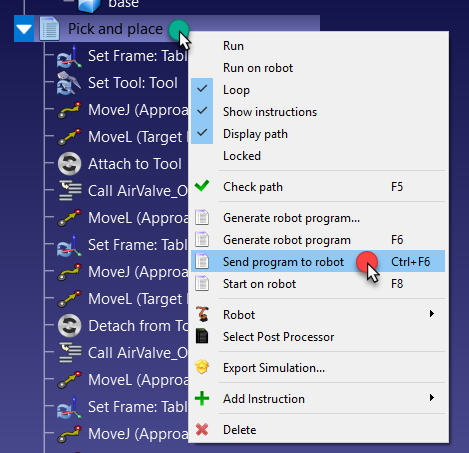
เมื่อโปรแกรม RoboDK ได้พร้อมที่จะส่งไปถึงหุ่นยนต์แล้ว:
1.คลิกขวาโปรแกรมใน RoboDK
2.เลือกSend program to robot (Ctrl+F6)
จะเป็นการสร้างโปรแกรมและพยายามถ่ายโอนไปถึงหุ่นยนต์ควบคุม วินโดว์จะป็อปอัพแสดงขึ้นถ้าการถ่ายโอน TFP ได้ถูกทำให้สำเร็จหรือไม่ก็ตาม
เมื่อโปรแกรมถูกถ่ายโอนผ่าน FTP เราจำเป็นต้องถูกโหลดโดยการใช้การเขียนโปรแกรม RAPID บนด้านชองหุ่นยนต์ ตัวอย่างต่อไปนี้จะดำเนินการโดยโปรแกรมmain_RoboDK จากโมดูลที่เรียกว่า MOD_Pick_and_place:
PERS bool progloaded := FALSE;
. . .
PROC Run_Program_FTP()
IF (progloaded=FALSE) THEN
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ELSE
UnLoad "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = FALSE;
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ENDIF
%main_RoboDK%; !call the main program from the module send and loaded
ENDPROC
ไดร์เวอร์ RoboDK สำหรับ ABB
ไดร์เวอร์หุ่นยนต์มีทางเลือกสำหรับการเขียนโปรแกรมออฟไลน์ (ซึ่งโปรแกรมได้ถูกสร้างขึ้น, จากนั้น, ถ่ายโอนหุ่นยนต์และสร้างขึ้น) ด้วยไดร์เวอร์หุ่นยนต์, อีกทั้งยังสามารถดำเนินการบนหุ่นยนต์โดยตรง (การเขียนโปรแกรมออนไลน์) ข้อมูลเพิ่มเติมดูได้ในส่วนRobot Drivers
การเชื่อมต่อระหว่างหุ่นยนต์RoboDK และ ABB สามารถถูกจัดตั้งขึ้นเพื่อย้ายหุ่นยนต์ออย่างอัตโนมัติจากการเชื่อมต่อ PC โดยใช้ RoboDK เป็นการอนุญาตใช้ RoboDK ทางเลือกRunonrobot สำหรับการเขียนโปรแกรมออนไลน์และการแก้ปัญหา การเชื่อมต่อสามารถจัดตั้งขึ้นผ่านการเชื่อมต่อพื้นฐาน Ethernet(TCP/IP)
ตามขั้นตอนต่อไปนี้เพื่อตั้งค่าไดร์เวอร์ RoboDK สำหรับหุ่นยนต์ ABB:
1.จัดตั้งการเชื่อมต่อ Ethernet ระหว่างคอมพิวเตอร์และหุ่นยนต์
2.ถ่ายโอนไฟล์MainModule.modและCOMM.modถึงหุ่นยนต์ (ถ่ายโอนโดย USB disk, FileZilla FTP หรือ RobotStudio สามารถถูกใช้ได้) ควรจะถูกใช้เหมือนกับงานหลัก
3.ทำตามขั้นตอนต่อไปนี้บนการสอนpendant ABB เพื่อโหลดโปรแกรมจากการสอน pendant:
a.เลือกABB➔Program Editor
b.เลือกTasksและPrograms (ข้างบน)
c.เลือกShow Modules (ตรงกลาง)
d.เลือกFile➔Load Module… (เลือก YES เพื่อสูญเสียตัวชี้โปรแกรม)
e.เลือกไฟล์COMM.mod , จากนั้นเลือก OK
f.เลือกไฟล์MainModule.mod, จากนั้นเลือกOK
4.ดำเนินการโปรแกรมMain (คุณจะพบโปรแกรมหลักใน MainModule.mod)
CONST string server_ip := "192.168.125.1";
Port การติดต่อสื่อสารเริ่มต้นสำหรับการจัดหาโปรแกรมเป็น 2000ถ้ามันสามารถถูกเปลี่ยนได้ด้วย